
The Box Topology
Following an earlier article on products of two topological spaces, we’ll now talk about a product of possibly infinitely many topological spaces. Suppose 

If we follow our instincts, the most natural definition would be:
Definition. The box topology on
is defined by the basis:

Since 
Problem 1 : As Terence Tao pointed out in his blog post, if we consider the space 

Reasonably, one would expect the xi‘s to converge to (0, 0, … ), but if we pick the open subset


then no term of the sequence actually lies in U. The problem is that X has too many open subsets.
Problem 2 : Let I be any index set and X be a topological space. The diagonal map 






which is not open in X in general if I is infinite. The fact that such a natural map is non-continuous makes things rather awkward.
 The Product Topology
The Product Topology
Let’s go back to the drawing board and decide what kind of subsets of 

to be continuous. This means for any open subset 

Definition. The product topology on X is given by the subbasis of “open slices”:

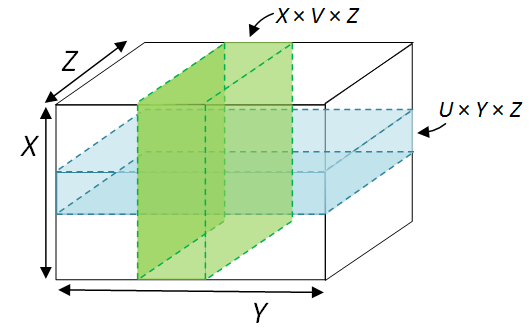
[ Open slices of X × Y × Z ]
Taking intersections of finitely many elements of this subbasis, we get the basis:

Note that for a finite product 
Taking the complement of an “open slice” gives the “closed slice”


Now if 

Proposition 1. The product
Since the box topology is an even finer topology,
Next, we’ll proceed to give some nice properties of the product topology. Hopefully, these will convince you that we’ve made the “right” choice.

Properties of Product Topology
We’ll give the most important property first.
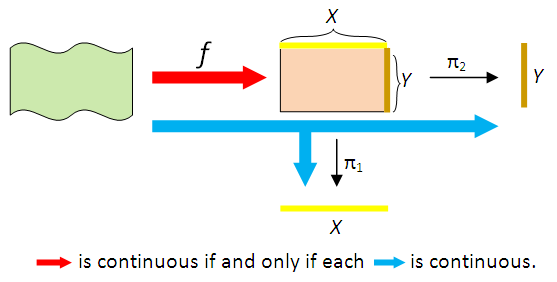
Universal Property of the Product. Let
Now, for any topological space Z and function
- f is continuous at
if and only if
is continuous at z, for each i.

Proof.
The forward direction is obvious since each 
For the converse, we need to show that for any open subset V of X containing f(x), 


which indeed contains an open subset containing z since 
In particular, we have:
Universal Property of the Product (II) : if Z is a topological space and f:Z → X is a map, then f is continuous if and only if πif is continuous for each index i.
In examining the proof of the universal property, the reader may suspect that this property uniquely defines the product topology, and he’d be right!
In what follows, we’ll list some results which can be proven by invoking the universal property.
Applications of the Universal Property
We’ll use the above universal property of the product topology to prove a variety of results.
Proposition 2. The diagonal map
Proof.
Continuity: by the universal property, it suffices to show that composing with each projection map gives a continuous map 
To show that the inverse map Δ(X) → X is continuous, note that it is simply the restriction of a projection map 
Proposition 3. Let
be a collection of continuous maps indexed by i. Then the map
which takes:
is continuous.

Proof
Let 

To prove f is continuous, the universal property tells us it suffices to show 

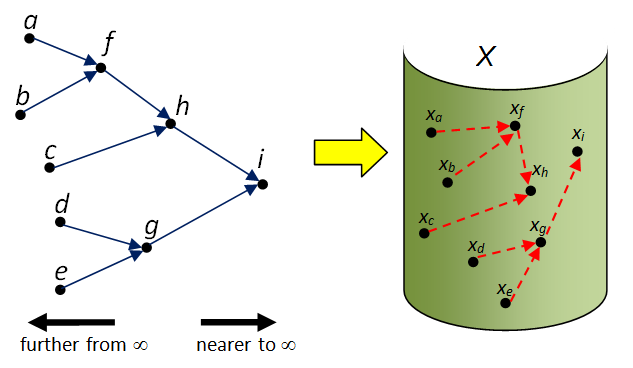
Proposition 4. Let J be a directed set and
be a net in
indexed by
Then
- the net converges converges to
if and only if for each fixed i, the net
converges in Xi.
[ Feel free to substitute “net” with “sequence” if you’re not too comfortable with it. ]
Proof.
As we noted earlier, 


is continuous at ∞. By the universal property, this is true if and only if for each i, the composition 


Application: consider the earlier sequence 


Proposition 5. Suppose we have a collection of collections of topological spaces
where the index set J(i) for j may depend on i. Then:
as topological spaces.

Proof.
Note that set-theoretically, there’s a natural bijection between the two sides. Let f : LHS → RHS and g : RHS → LHS be this bijection and its inverse. We need to show that they’re both continuous.
There are three collections of projection maps, all of which are continuous.

for various
- To show that f is continuous, we need to show
is continuous for any i, j. But this map is simply
so it is indeed continuous.
- To show that g is continuous, we need to show
is continuous for each i. For that, we need to show that
is continuous for each
But this is simply
so it is indeed continuous. ♦
Exercise (on Universal Properties)
Prove the following universal property for subspace. Suppose 

- for any topological space Z, a function f : Z → Y is continuous if and only if
is continuous.
Suppose 

- take the subspace topology on each
or
- take the product topology on
then take the subspace topology

Prove that both constructions give the same topology, using the universal properties of the product and the subspace topologies.
Interior and Closure
Next, we attempt to generalise the prior two articles on interior/closure of products.
Proposition 6. If
in general;

Proof.
For the first property, suppose each Yi is open in Xi. Then the RHS is 
For the second property, the RHS is a closed subset containing 


such that 




Exercise
Prove that in the box topology, we do have:


Thus there’s at least one aspect of the box topology which triumphs the product topology.
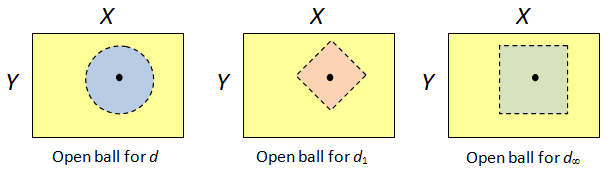
Product of Metric Spaces
Finally, we ask: if each 

The first step is to replace each di with a bounded metric. Recall that for any metric space (X, d), replacing d with 

It’s not hard to check that d is a metric bounded by 1.
The only question is whether the induced topology is identical to the product topology.
First, let’s consider each open slice: 




Conversely, consider an open ball N(a, ε) in the metric topology, where

is open in the product topology, and the distance between a and any point in this set is bounded by 
 contained in Y.
contained in Y. we see that Σ is not empty.
we see that Σ is not empty. As before, the interior satisfies the following.
As before, the interior satisfies the following. : since a union of open subsets is open, so int(Y) must be open;
: since a union of open subsets is open, so int(Y) must be open; then since int(Y) is a union of many sets including U, we must have
then since int(Y) is a union of many sets including U, we must have 

 are subsets of X, then
are subsets of X, then 
 The interior is (0, 1).
The interior is (0, 1).

 which is exactly what we desired to prove. ♦
which is exactly what we desired to prove. ♦ are subsets, then
are subsets, then



![Y_n = [-\frac 1 n, +\frac 1 n],](https://s0.wp.com/latex.php?latex=Y_n+%3D+%5B-%5Cfrac+1+n%2C+%2B%5Cfrac+1+n%5D%2C&bg=ffffff&fg=333333&s=0&c=20201002) then the intersection
then the intersection  On the other hand,
On the other hand, 
 But
But 
 and
and 

 we get
we get  Since this works for each i, we’re done.
Since this works for each i, we’re done. so this gives
so this gives  Since this holds for each i, we’re done.
Since this holds for each i, we’re done. be subsets of a topological space X. Then:
be subsets of a topological space X. Then:
 On the other hand,
On the other hand,  so the RHS is empty. ♦
so the RHS is empty. ♦ and
and  are subsets of topological spaces, then
are subsets of topological spaces, then

 is an open subset of
is an open subset of  and is contained in
and is contained in  we see that the RHS is contained in the LHS.
we see that the RHS is contained in the LHS. then there’s a basic open subset U×V such that
then there’s a basic open subset U×V such that  Then
Then  and
and  so
so  and
and  So the LHS is contained in the RHS. ♦
So the LHS is contained in the RHS. ♦ we define the boundary of Y to be the difference
we define the boundary of Y to be the difference then
then 








 then
then 
 we have
we have 

 containing Y.
containing Y. , so Σ is not empty.
, so Σ is not empty.
 : since an intersection of closed subsets is still closed;
: since an intersection of closed subsets is still closed; then since cl(Y) is the intersection of many sets, including C, we must have
then since cl(Y) is the intersection of many sets, including C, we must have 
 The closure is [0, 1].
The closure is [0, 1]. is a closed subset since the complement (which contains all x such that d(x, a) > ε) is open in X.
is a closed subset since the complement (which contains all x such that d(x, a) > ε) is open in X. is not the closed ball
is not the closed ball  in general. For a rather pathological example, consider
in general. For a rather pathological example, consider ![X = [-1, +1] \cup \{2\}](https://s0.wp.com/latex.php?latex=X+%3D+%5B-1%2C+%2B1%5D+%5Ccup+%5C%7B2%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002) and take the open ball Y = N(0, 2). Then Y = [-1, +1] is already closed in X so cl(Y) = Y, while the closed ball N(0, 2)* = X ≠ cl(Y).
and take the open ball Y = N(0, 2). Then Y = [-1, +1] is already closed in X so cl(Y) = Y, while the closed ball N(0, 2)* = X ≠ cl(Y). where Yacc is the collection of all
where Yacc is the collection of all  is closed in X.
is closed in X. then in particular x is not a point of accumulation of Y, so there exists an open subset
then in particular x is not a point of accumulation of Y, so there exists an open subset  i.e.
i.e. 
 Suppose on the contrary
Suppose on the contrary  so in particular y is a point of accumulation of Y. Since U is an open subset of X containing y, we have U ∩ Y containing a point z ≠ y, which contradicts what we just proved. Thus
so in particular y is a point of accumulation of Y. Since U is an open subset of X containing y, we have U ∩ Y containing a point z ≠ y, which contradicts what we just proved. Thus  so X–C is a union of open subsets and is thus open.
so X–C is a union of open subsets and is thus open. This gives
This gives  which completes the proof. ♦
which completes the proof. ♦ , it must contain the LHS also.
, it must contain the LHS also. we have
we have  Similarly,
Similarly,  so the LHS contains the RHS. ♦
so the LHS contains the RHS. ♦
 However, this is as far as we go, as we cannot extend this to the union of infinitely many sets. E.g. if
However, this is as far as we go, as we cannot extend this to the union of infinitely many sets. E.g. if ![Y_n = [\frac 1 n, 1]](https://s0.wp.com/latex.php?latex=Y_n+%3D+%5B%5Cfrac+1+n%2C+1%5D&bg=ffffff&fg=333333&s=0&c=20201002) in X=R, then since each
in X=R, then since each  is closed, we have
is closed, we have ![\cup_n\text{cl}(Y_n) = \cup_n Y_n=(0, 1]](https://s0.wp.com/latex.php?latex=%5Ccup_n%5Ctext%7Bcl%7D%28Y_n%29+%3D+%5Ccup_n+Y_n%3D%280%2C+1%5D&bg=ffffff&fg=333333&s=0&c=20201002) which isn’t closed, so it cannot possibly be
which isn’t closed, so it cannot possibly be 

 Since this holds for every i, we get the desired inclusion.
Since this holds for every i, we get the desired inclusion. for each i, we have
for each i, we have  Since this holds for each i, we’re done. ♦
Since this holds for each i, we’re done. ♦ are subsets of a topological space X, then the closure of Y in Z is the intersection of Z with the closure of Y in X.
are subsets of a topological space X, then the closure of Y in Z is the intersection of Z with the closure of Y in X. and
and 
 it must contain the LHS. For the reverse inclusion, we prove by contradiction by p
it must contain the LHS. For the reverse inclusion, we prove by contradiction by p so there is an open subset containing (x, y) which doesn’t intersect Y1 × Y2.
so there is an open subset containing (x, y) which doesn’t intersect Y1 × Y2. and so
and so  or
or 
 Since
Since  we also have
we also have  thus giving
thus giving 
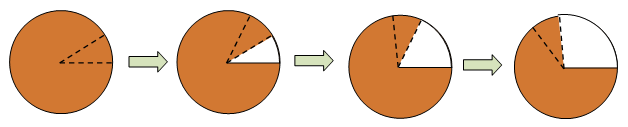


 ), then inverting a slice corresponds to a bijective function on S. By elementary theory of permutations, we must eventually get back the original configuration, i.e. all chocolate icing up.
), then inverting a slice corresponds to a bijective function on S. By elementary theory of permutations, we must eventually get back the original configuration, i.e. all chocolate icing up.

 in X is said to be Cauchy if
in X is said to be Cauchy if
 in the metric space (X, d). For any ε>0, there exists N such that whenever n > N, we have
in the metric space (X, d). For any ε>0, there exists N such that whenever n > N, we have  Thus, whenever m, n > N, we have:
Thus, whenever m, n > N, we have: ♦
♦ are sequences of metric spaces
are sequences of metric spaces  respectively, then
respectively, then  is a Cauchy sequence of X × Y if and only if each of
is a Cauchy sequence of X × Y if and only if each of  ;
; ;
; .
. are Cauchy. For any ε>0,
are Cauchy. For any ε>0,


 and
and 
 is Cauchy, but the resulting sequence
is Cauchy, but the resulting sequence  is not. Put in another way, we can define two metrics on R+ via
is not. Put in another way, we can define two metrics on R+ via  and
and  Then the sequence
Then the sequence  of metric spaces is said to be Cauchy-continuous if whenever
of metric spaces is said to be Cauchy-continuous if whenever  is a Cauchy sequence in Y.
is a Cauchy sequence in Y. of metric spaces is said to be uniformly continuous if
of metric spaces is said to be uniformly continuous if satisfies
satisfies  we have
we have 
 We now have:
We now have: but
but 
 , we have
, we have 

 So
So  is uniformly continuous.
is uniformly continuous. and
and  are uniformly continuous functions of metric spaces, then so is
are uniformly continuous functions of metric spaces, then so is 
 and
and  are uniformly continuous, where the metric on X × Y is one of the three in proposition 3.
are uniformly continuous, where the metric on X × Y is one of the three in proposition 3. and
and 

 is continuous at
is continuous at  . Unrolling the definition, it means that for any open subset U of X containing a, the set
. Unrolling the definition, it means that for any open subset U of X containing a, the set  contains (N, ∞] for some N. In other words,
contains (N, ∞] for some N. In other words, .
. . Does it mean
. Does it mean  ?
? , x≠a.
, x≠a.
 .
. , so it is not a point of accumulation of Y. By definition, there exists an open subset U containing a such that U ∩ Y has no point other than possibly a. But a is not in Y anyway, so U ∩ Y is empty, i.e.
, so it is not a point of accumulation of Y. By definition, there exists an open subset U containing a such that U ∩ Y has no point other than possibly a. But a is not in Y anyway, so U ∩ Y is empty, i.e.  and X–Y is open in X.
and X–Y is open in X. , there exists
, there exists  such that
such that  . In words, this means that every finite subset has an upper bound.
. In words, this means that every finite subset has an upper bound. .
. has limit
has limit 

 iff
iff  Since a is a point of accumulation of Y, for each
Since a is a point of accumulation of Y, for each  we can pick
we can pick  Then
Then  so
so  Since X–Y is open in X, there exists index i such whenever j≥i,
Since X–Y is open in X, there exists index i such whenever j≥i,  which is a contradiction. ♦
which is a contradiction. ♦ , where ∞ is just a dummy symbol. A basis for open subsets of I* is given by:
, where ∞ is just a dummy symbol. A basis for open subsets of I* is given by: , for various
, for various 


 is an index, then k ≥ i and k ≥ j so
is an index, then k ≥ i and k ≥ j so  is found in the RHS. The only case left is
is found in the RHS. The only case left is  Since I is a directed set, there exists k≥i and k≥j. Thus, the RHS is a non-empty union and ∞ is in the RHS. This proves that LHS is contained in RHS.
Since I is a directed set, there exists k≥i and k≥j. Thus, the RHS is a non-empty union and ∞ is in the RHS. This proves that LHS is contained in RHS. is exactly the same as that
is exactly the same as that  where the limit was defined in the
where the limit was defined in the 
 is a net in X × Y, then
is a net in X × Y, then  if and only if
if and only if  and
and 
 if and only if the function I* → X × Y which takes
if and only if the function I* → X × Y which takes  and
and  is continuous. Now we use the following property, whose proof is left as an exercise.
is continuous. Now we use the following property, whose proof is left as an exercise.

 such that
such that  but
but  Then
Then 

 such that
such that  iff
iff  Since no Ui is contained in f-1(V), we can pick
Since no Ui is contained in f-1(V), we can pick  for each i. Then
for each i. Then  doesn’t approach f(a) since they lie outside V. ♦
doesn’t approach f(a) since they lie outside V. ♦ if the function:
if the function:
 is said to converge to a if the function f : N* – {∞} → X, f(n) = xn, approaches a as n approaches ∞. A sequence which has a limit is called a convergent sequence.
is said to converge to a if the function f : N* – {∞} → X, f(n) = xn, approaches a as n approaches ∞. A sequence which has a limit is called a convergent sequence.
 .
. converges to a. Given any ε>0, N(a, ε) is an open ball containing a. By definition, if g : N* → X is defined by g(n)=xn, for n=1, 2, 3, … and g(∞)=a, then g is continuous at ∞. Thus
converges to a. Given any ε>0, N(a, ε) is an open ball containing a. By definition, if g : N* → X is defined by g(n)=xn, for n=1, 2, 3, … and g(∞)=a, then g is continuous at ∞. Thus  contains an open subset of N* containing ∞. So U contains some UN = {N, N+1, N+2, … } and
contains an open subset of N* containing ∞. So U contains some UN = {N, N+1, N+2, … } and 
 containing a must contain an open ball
containing a must contain an open ball  for some ε>0. Then there exists N such that whenever n>N,
for some ε>0. Then there exists N such that whenever n>N,  Thus
Thus  contains the set UN+1 = {N+1, N+2, N+3, …, ∞} which is an open subset containing ∞. ♦
contains the set UN+1 = {N+1, N+2, N+3, …, ∞} which is an open subset containing ∞. ♦ Again we should think of the infinities as dummy symbols. Its topology is defined via the basis:
Again we should think of the infinities as dummy symbols. Its topology is defined via the basis: for real a < b;
for real a < b;![(a,\infty] = (a, \infty) \cup \{\infty\}](https://s0.wp.com/latex.php?latex=%28a%2C%5Cinfty%5D+%3D+%28a%2C+%5Cinfty%29+%5Ccup+%5C%7B%5Cinfty%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002) for real a;
for real a; for real b.
for real b. is a sequence of real numbers, then
is a sequence of real numbers, then  in the
in the  which takes
which takes  tends to ∞ as n tends to ∞.
tends to ∞ as n tends to ∞. is a function, then
is a function, then  in the
in the  tends to L as x→∞.
tends to L as x→∞. which takes
which takes  is continuous at ∞. Indeed, any open subset of
is continuous at ∞. Indeed, any open subset of  containing ∞ must contain some (L, ∞]. By classical definition, there exists N such that whenever n>N, we have xn>L. Then
containing ∞ must contain some (L, ∞]. By classical definition, there exists N such that whenever n>N, we have xn>L. Then ![g^{-1}((L,\infty])](https://s0.wp.com/latex.php?latex=g%5E%7B-1%7D%28%28L%2C%5Cinfty%5D%29&bg=ffffff&fg=333333&s=0&c=20201002) contains
contains  , an open set containing ∞.
, an open set containing ∞. be the function which takes real x to f(x) and ∞ to L; our job is to prove continuity of g at ∞. Let V be an open subset of R containing L, which contains (L-ε, L+ε) for some ε>0. By classical definition, there exists M such that whenever x>M, f(x) lies in (L-ε, L+ε) and hence V. Thus,
be the function which takes real x to f(x) and ∞ to L; our job is to prove continuity of g at ∞. Let V be an open subset of R containing L, which contains (L-ε, L+ε) for some ε>0. By classical definition, there exists M such that whenever x>M, f(x) lies in (L-ε, L+ε) and hence V. Thus, ![(M,\infty] \subseteq f^{-1}(V)](https://s0.wp.com/latex.php?latex=%28M%2C%5Cinfty%5D+%5Csubseteq+f%5E%7B-1%7D%28V%29&bg=ffffff&fg=333333&s=0&c=20201002) is an open subset of
is an open subset of  . If g : Y → Z is continuous at b, then gf : X-{a} → Z satisfies
. If g : Y → Z is continuous at b, then gf : X-{a} → Z satisfies  .
. and
and  via:
via: and
and 
 in the topological space X, and f : X → Y is continuous, then
in the topological space X, and f : X → Y is continuous, then  in Y.
in Y. , the function
, the function  which takes
which takes  . By the previous proposition, we get
. By the previous proposition, we get  and so
and so  ♦
♦ unique? Phrased in such generality, the answer is no, as we saw
unique? Phrased in such generality, the answer is no, as we saw  , there exist open subsets U and V,
, there exist open subsets U and V,  ,
,  ,
,  .
.
 ,
,  ,
,  , (ii) whenever n>N, we have
, (ii) whenever n>N, we have  . The two statements clearly contradict. ♦
. The two statements clearly contradict. ♦ , for if z satisfies d(x, z) < ε and d(y, z) < ε, then d(x, y) ≤ d(x, z) + d(z, y) < 2ε = d(x, y), which is absurd. In particular, any convergent sequence in a metric space has a unique limit.
, for if z satisfies d(x, z) < ε and d(y, z) < ε, then d(x, y) ≤ d(x, z) + d(z, y) < 2ε = d(x, y), which is absurd. In particular, any convergent sequence in a metric space has a unique limit. are distinct limits. Hence the functions
are distinct limits. Hence the functions  ,
, and
and 
 ,
,  and
and  must contain an open subset which contains a. Same for
must contain an open subset which contains a. Same for  . But since
. But since  , the intersection of these two open subsets is {a}, which contradicts the second condition. ♦
, the intersection of these two open subsets is {a}, which contradicts the second condition. ♦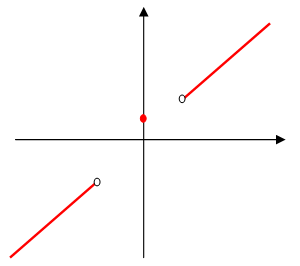
 and f : X-{0} → R is defined by f(x)=x. But because {0} is an open subset of X, f(0) can take any value without violating its continuity.
and f : X-{0} → R is defined by f(x)=x. But because {0} is an open subset of X, f(0) can take any value without violating its continuity. which is often more convenient.
which is often more convenient.
 containing f(a), there’s an open subset
containing f(a), there’s an open subset  containing a.
containing a. is open.
is open. for some ε>0. By continuity at
for some ε>0. By continuity at  . Hence
. Hence  is an open subset containing
is an open subset containing  is an open subset of Y containing f(a), so there is an open
is an open subset of Y containing f(a), so there is an open  . It thus follows that
. It thus follows that  .
. is contained in an open subset
is contained in an open subset  which is contained in U. Thus U is a union of open subsets and is hence open.
which is contained in U. Thus U is a union of open subsets and is hence open.  Let a be any point in X. From what we just proved, f is continuous at a. ♦
Let a be any point in X. From what we just proved, f is continuous at a. ♦ is continuous.
is continuous.
 . To show continuity at that point, suppose ε>0. Letting δ = ε/2, we see that whenever
. To show continuity at that point, suppose ε>0. Letting δ = ε/2, we see that whenever  , we have: d(x, x’) < δ and d(y, y’) < δ and thus the triangular inequality gives:
, we have: d(x, x’) < δ and d(y, y’) < δ and thus the triangular inequality gives: are continuous, as is reciprocal
are continuous, as is reciprocal 
 From the third property, one sees that if f : X → Y is bijective and continuous, the inverse
From the third property, one sees that if f : X → Y is bijective and continuous, the inverse  may not be continuous. Specifically, if T is strictly finer than T’, then the identity map (X, T) → (X, T’) is continuous but (X, T’) → (X, T) is not. Recall that if f : X → Y is bijective, continuous and has a continuous inverse, then we say f is a homeomorphism, in which case we get a bijection between the collection of open subsets of X and that of Y.
may not be continuous. Specifically, if T is strictly finer than T’, then the identity map (X, T) → (X, T’) is continuous but (X, T’) → (X, T) is not. Recall that if f : X → Y is bijective, continuous and has a continuous inverse, then we say f is a homeomorphism, in which case we get a bijection between the collection of open subsets of X and that of Y. be a subbasis of Y. Then f is continuous iff for any
be a subbasis of Y. Then f is continuous iff for any  ,
,  is open.
is open.
 ♦
♦ and
and  are open in X for any real a, b.
are open in X for any real a, b. is a collection of topological spaces and
is a collection of topological spaces and  is the disjoint union, then every inclusion map
is the disjoint union, then every inclusion map  is continuous.
is continuous. which is open in Y by definition of subspace. For the second statement, each open
which is open in Y by definition of subspace. For the second statement, each open  which is open in X × Y by definition of product space. For the last statement, each open subset
which is open in X × Y by definition of product space. For the last statement, each open subset  of X pulls back to
of X pulls back to  which is open in Xi. ♦
which is open in Xi. ♦ is a function of topological spaces and
is a function of topological spaces and  is a union of open subsets
is a union of open subsets  , then
, then is continuous for every i.
is continuous for every i. is continuous, so is the composition
is continuous, so is the composition  . Conversely, suppose each
. Conversely, suppose each  is continuous. Let V be an open subset of Y. Then
is continuous. Let V be an open subset of Y. Then
 is open in
is open in  which is in turn open in X. Thus,
which is in turn open in X. Thus,  and
and  are subspaces such that
are subspaces such that  . Prove that the restriction
. Prove that the restriction  is also continuous.
is also continuous. which takes
which takes  , is also continuous.
, is also continuous. Prove that we get a continuous map
Prove that we get a continuous map  which takes an element
which takes an element  to the corresponding image in Y.
to the corresponding image in Y. be a set-theoretic disjoint union. We wish to define a topology on Z in a most natural way.
be a set-theoretic disjoint union. We wish to define a topology on Z in a most natural way.


 , where the open subsets of U are precisely those of the form
, where the open subsets of U are precisely those of the form  for open subsets
for open subsets  .
. is a basis of
is a basis of  is a basis for X.
is a basis for X. is a basis of
is a basis of  is a basis for X.
is a basis for X. since an open subset of Xi is also open in X. Thus
since an open subset of Xi is also open in X. Thus  Conversely, every open subset U of X is a (disjoint) union of open subsets of Xi, each of which is a union of elements of
Conversely, every open subset U of X is a (disjoint) union of open subsets of Xi, each of which is a union of elements of  be a collection of topological spaces. Then:
be a collection of topological spaces. Then:
 for some open subsets
for some open subsets  . But this is just
. But this is just  and since each
and since each  is open, so is their (disjoint) union. Thus, the LHS topology is contained in the RHS.
is open, so is their (disjoint) union. Thus, the LHS topology is contained in the RHS. of the RHS is given by
of the RHS is given by  , where
, where  is a basis of RHS. Since each element of this basis is open in LHS, the RHS topology is contained in the LHS. ♦
is a basis of RHS. Since each element of this basis is open in LHS, the RHS topology is contained in the LHS. ♦ , where each
, where each  .
.
 metrisable too?
metrisable too? in different components are extremely far from each other. But one can’t set the distance between them to be infinite, since the metric can only take real values. [ One might understandably think of extending the metric function to include infinite distances, or even “nonstandard reals”, but that opens up a whole new can of worms. ]
in different components are extremely far from each other. But one can’t set the distance between them to be infinite, since the metric can only take real values. [ One might understandably think of extending the metric function to include infinite distances, or even “nonstandard reals”, but that opens up a whole new can of worms. ] ,
,  , is also a metric.
, is also a metric. , then
, then  . Since
. Since  is a strictly increasing function, we may assume t = r+s. Then clearing denominators gives:
is a strictly increasing function, we may assume t = r+s. Then clearing denominators gives: ♦
♦ , we have
, we have 
 , then each
, then each  is an open subset. The following theorem shows that this suffices to characterise X as a disjoint union.
is an open subset. The following theorem shows that this suffices to characterise X as a disjoint union. , where each
, where each  is open and
is open and  for any i≠j. Then
for any i≠j. Then  .
.
![Y=(-\infty, -1]\cup\{0\}\cup [1,\infty)](https://s0.wp.com/latex.php?latex=Y%3D%28-%5Cinfty%2C+-1%5D%5Ccup%5C%7B0%5C%7D%5Ccup+%5B1%2C%5Cinfty%29&bg=ffffff&fg=333333&s=0&c=20201002) of R. Then
of R. Then  where
where ![U=(-\infty, -1]](https://s0.wp.com/latex.php?latex=U%3D%28-%5Cinfty%2C+-1%5D&bg=ffffff&fg=333333&s=0&c=20201002) ,
,  and
and  . Each of these sets is open in Y since
. Each of these sets is open in Y since ,
,  and
and 
 .
. , we get a set-theoretic map
, we get a set-theoretic map  . The map is surjective since X is the union of Ui‘s. It is injective since any two distinct Ui‘s don’t intersect.
. The map is surjective since X is the union of Ui‘s. It is injective since any two distinct Ui‘s don’t intersect. is of the form
is of the form  for open
for open  . Since
. Since  is open. Thus
is open. Thus  is open in X.
is open in X. , where
, where  is open in Ui. Thus
is open in Ui. Thus  ♦
♦ which is open. Thus the Ui are clopen subsets of X: if X is a disjoint union of more than one components, than each component is a clopen subset.
which is open. Thus the Ui are clopen subsets of X: if X is a disjoint union of more than one components, than each component is a clopen subset. . Then
. Then  satisfies the conditions of the above theorem, so
satisfies the conditions of the above theorem, so  . Hence, we have the following.
. Hence, we have the following. in a non-trivial manner. When that happens, we say that X is connected.
in a non-trivial manner. When that happens, we say that X is connected. , let:
, let: ;
; ;
; .
.
 ,
, and
and 


 are closed subsets, then C × D is closed in X × Y, because its complement is
are closed subsets, then C × D is closed in X × Y, because its complement is  , which is a union of two open subsets.
, which is a union of two open subsets. is a basis of X × Y.
is a basis of X × Y. is a subbasis of X × Y.
is a subbasis of X × Y.
 is a basis of X × Y. But since BX and BY are bases of X and Y, we can write
is a basis of X × Y. But since BX and BY are bases of X and Y, we can write  ,
,  for some
for some  . This gives
. This gives  so every element of B’ is expressible as a union of elements of B.
so every element of B’ is expressible as a union of elements of B. , we can write
, we can write  and
and  for some
for some  ,
,  . This gives
. This gives  Thus every element of the collection
Thus every element of the collection  is a finite intersection of elements of S; by the first statement, S is a subbasis for X × Y. ♦
is a finite intersection of elements of S; by the first statement, S is a subbasis for X × Y. ♦ , via
, via  ;
; , via
, via  .
. Also, given a finite number of topological spaces
Also, given a finite number of topological spaces  , one can unreservedly take their product
, one can unreservedly take their product  since product of topological spaces is commutative and associative.
since product of topological spaces is commutative and associative. ,
,  be subsets. One can define a topology on X’ × Y’ in two distinct ways.
be subsets. One can define a topology on X’ × Y’ in two distinct ways.