
Recall that a sequence 



- for any open subset
containing a, there exists N such that when n > N,
.
We also saw that if X is Hausdorff, then the limit a is unique, but we won’t make that assumption now.
The key question here is:
Suppose
is a subspace and
. Does it mean
?
Even in the case where X = R, this is not true for some subspaces, e.g. Y = (0, 1), where the sequence 
Definition. Let a be a point in topological space X. We say it is a point of accumulation for Y if for every open subset
, x≠a.

The Case of Metric Spaces
Let’s examine this definition for a metric space X. In this case, a is a point of accumulation for Y iff for each ε>0, the intersection N(a, ε) ∩ Y contains some point other than a. Indeed, (LHS) → (RHS) follows from the fact that N(a, ε) is an open subset containing a, while (RHS) → (LHS) follows from the fact that every open subset containing a must contain an open ball N(a, ε).
Example
Suppose X = R and Y is the set of rational numbers 0 < r < 1. Then any real number in [0, 1] is a point of accumulation for Y since for any ε>0, the open ball N(r, ε) must contain a rational number. [ The full rigourous argument needs a bit more care, but we won’t harp on this any more. ]
This result is reminiscent of an earlier one.
Theorem 1. In a metric space X and subspace Y, the following are equivalent.
- If
.
- Y contains all its points of accumulation.
- Y is closed in X.
Proof.
(1) → (2) : let a be a point of accumulation of Y. For each n = 1, 2, …, N(a, 1/n) ∩ Y contains a point xn ≠ a. Then (xn) is a sequence in Y converging to a; thus a is in Y.
(2) → (3) : let 

(3) → (1) : suppose (xn) is a sequence in Y converging to a. If
 The Case of Topological Spaces
The Case of Topological Spaces

We will see later that in the case of topological spaces, (2) and (3) are still equivalent, but (1) fails. The problem lies in the definition of sequences, which is essentially a function f : N* – {∞} → X, and the space N* is given unnecessary prominence. To overcome this one needs a more general form of sequences for topological spaces.
Definition. A directed set is a partially ordered set I such that for any
, there exists
such that
. In words, this means that every finite subset has an upper bound.
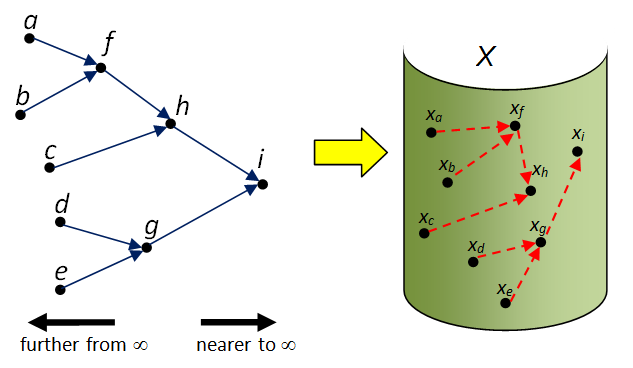
A net in a topological space X (indexed by I) is a function f : I → X, written as
.
We say that a net
has limit

Now the following is true.
Theorem 2. Let Y be a subspace of a topological space X. The following are equivalent.
- If
- Y contains all its points of accumulation.
- Y is closed in X.

Proof
(1) → (2) : suppose a is a point of accumulation of Y. Let the index set I correspond to the collection of open subsets U containing a, ordered by reverse inclusion: 




(2) → (3) : identical to earlier.
(3) → (1) : let 

Interlude: Alternate Look at Nets
At this point, the reader may wonder why we need I to be a directed set, i.e. wouldn’t an ordinary partially ordered set (poset) suffice? Indeed, the above theorem seems to work even when I is just a poset.
To answer this question, we provide an alternate definition for nets and limits. Given a directed set I, let 
, for various

To check that this is a basis, we claim that

- Indeed, clearly RHS is contained in LHS since
- Conversely, if
is an index, then k ≥ i and k ≥ j so
is found in the RHS. The only case left is
Since I is a directed set, there exists k≥i and k≥j. Thus, the RHS is a non-empty union and ∞ is in the RHS. This proves that LHS is contained in RHS.

Thus, the fact that I is a directed set is necessary for Pi‘s to form a basis. Otherwise, they’d only form a subbasis in which case it’s possible for {∞} to be open in I*.
Next, the condition that a net 

Proposition 3. If X is Hausdorff, a converging net in X has a unique limit.
Finally, we have the following.
Proposition 4. If g : X → Y is a continuous map of topological spaces, then every convergent net

The proof follows from the proposition here.
Proposition 5. If
is a net in X × Y, then
if and only if
and
Proof.
We have 


- If X, Y, Z are topological spaces, then f : Z → X × Y is continuous if and only if composing it with the projection maps X × Y → X and X × Y → Y, we get continuous maps Z → X and Z → Y.
So the above function I* → X × Y is continuous if and only if composing with the projection maps give continuous functions I* → X and I* → Y. And this is true if and only if 
One Final Result
Another sign that nets are a good way to generalise sequences:
Theorem 6.
If f : X → Y is a map of metric spaces, then f is continuous if and only if for any convergent sequence
, we also have
If f : X → Y is a map of topological spaces, then f is continuous if and only if for any convergent net


Proof.
The forward direction in both cases has been proven in proposition 4 above and here. For the converse:
First statement: if f is not continuous at a, then there exists ε>0 such that for any δ>0, we can find x in X such that dX(x, a) < δ but dY(f(x), f(a)) ≥ ε. Letting δ = 1/n for n=1, 2, 3, … we get a sequence 



Second statement: if f is not continuous at a, there exists an open subset 






