This post is only tangentially related to mathematics. As an experiment on AI-assisted learning, I tried to write a web application in Javascript + WebGL. At the start of this experiment, I had some experience with Javascript but absolutely no knowledge of WebGL. My objective was to program a simple interface for manipulating a Rubik’s cube.
Within a few hours, I ended up with this:
https://lzw75.github.io/webgl/rubik_webgl.html
Instructions:
- Use the 4 arrow keys to rotate the entire cube.
- Hover your mouse cursor over the white “buttons” and use the mouse scroller to rotate the faces.
The following is a summary of how I picked up some basics of WebGL by constantly polling ChatGPT.
First I needed to know how to draw a cube, so I asked:
Help me write an HTML file using WebGL to display a cube. Allow the reader to vary the viewing angles.
ChatGPT replied with a piece of code to do the above. The resulting code let the user change the orientation of the cube via the 4 arrow keys.
Interestingly, the code also rotated the cube continuously:
var render = function () {
requestAnimationFrame(render);
cube.rotation.x += 0.1;
cube.rotation.y += 0.1;
renderer.render(scene, camera);
};
render();
I did not ask for this functionality but it turned out to be useful later.
My first idea was to have a single cube, with each face partitioned into 3 x 3 squares. But I wasn’t sure how to rotate each face with this geometry. Instead, I decided to have 27 cube objects. Next, I needed to have a different colour for each face. So I asked:
I want a cube with all six sides of different colors.
ChatGPT replied with the appropriate code, but the scene turned out black. So I responded:
I tried it but the cube isn’t appearing.
Happily, ChatGPT managed to point out the problem: it listed four possible causes, and I quickly identified the third one (lack of light source) to be the right one. ChatGPT even amended its original code to add a new light source, and lo and behold, it now worked!
Next I needed to add 27 cubes, so I asked:
How do I add 3 cubes of the same size in different parts of space?
With the reply, I could create the 27 cubes required to form a Rubik’s cube. But I recalled in many applications, one can form groups of objects for easier manipulation. So:
In WebGL, can I form a composite object comprising of three cubes?
ChatGPT suggested creating multiple THREE.Mesh objects, then putting them together in a THREE.Group object. That was exactly what I wanted.
Now to rotate a face of the cube, I needed to first identify which cubes to rotate. In each case, 9 cubes were chosen out of 27 for rotation. For that I needed the following.
In WebGL how do I access sub objects in a group object?
But ChatGPT didn’t give me what I wanted, because I had for some reason started a new conversation. The reply was ambiguous and unhelpful. So I tried again:
I have a WebGL object named “cubes” of from “THREE.Group()”. How do I access the third element in the list?
Note the grammatical mistake in the first sentence (that was completely unintentional!). Thankfully, ChatGPT correctly interpreted my intentions and gave me the following sample code (together with a rather long explanation and other variants):
let cube = cubes.children[2];
Exactly what I needed. My next thought was to put the 9 cubes in a separate group, then rotate the group. So I asked:
In WebGL, can a single cube belong to two “THREE.Group” objects simultaneously?
ChatGPT replied in the positive so I went about to edit my code, adding the 9 cubes to a separate group for rotation. But then I faced a problem:
In the following WebGL code:
function move1(all_cubes) {
var cube_list = all_cubes.children;
var tmp_group = new THREE.Group();
for(var i = 0; i < cube_list.length; i++) {
console.log(cube_list[i].position);
if (cube_list[i].position.x < -0.99)
tmp_group.add(cube_list[i]);
}
}
The object “cube_list” had some of its objects removed, when I added them to the object “tmp_group”. Why?
ChatGPT explained that the objects were being removed from the all_cubes group because they were being added to the tmp_group group. I could overcome this by cloning the cube. Finding this too much a chore, I decided against this and just rotated the 9 cubes manually. Next:
How do I rotate a 3D WebGL object with centre of rotation specified by (x, y, z)?
And so on…
Summary
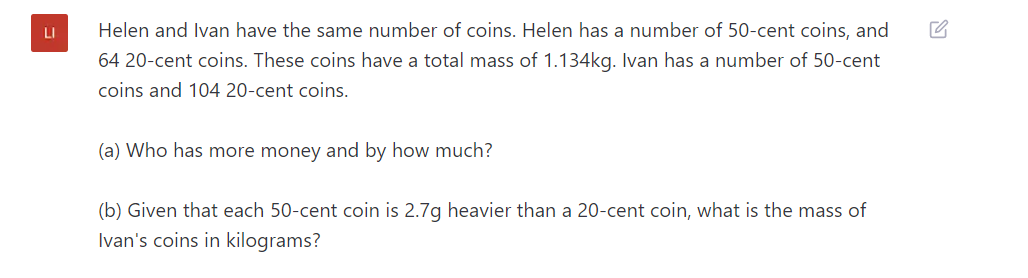
Thus the general outline seems clear. At each stage I had a mental image of what I wanted to do, broke down the process into specific subtasks, then queried ChatGPT for a very concrete implementation of the said subtask. Other than the above examples, I asked:
- how I could access the mouse scroller in Javascript,
- how I could do animation in WebGL (this took a few tries with different wordings, as each time, ChatGPT would reply with a different approach),
- if I could access the contents of an array produced by a function (yes, elementary question), etc.
Here are some problems I encountered.
- ChatGPT was often down due to heavy usage.
So I had to revert to Google. After one gets used to ChatGPT’s useful replies, Google’s search results seemed frustratingly irrelevant in comparison.
- The reply was sometimes truncated.
This was rare, but fortunately when it happened, the existing reply was sufficiently useful for my purpose. In any case, people have reported we could just type ‘continue’ and ChatGPT would display the remaining response. [ Warning: this does not work for code, arguably the most important case. ]
- The answer worked but it wasn’t satisfactory to me.
For instance, ChatGPT once suggested using the TWEEN library to animate face rotations, but I considered it too much of a hassle. It took a few more queries for me to coax ChatGPT into giving me a solution using ‘render()’. In retrospect, the first reply already provided me a possible approach.
- The answer was in a different context.
Sometimes ChatGPT gave a reply using a gl.* framework, but what I really wanted was the THREE.* framework. This could be solved by further specification (e.g. ‘reformulate the reply for a THREE.Cube object type’).
- The answer just plain didn’t work.
In one instance, ChatGPT gave the following output:
THREE.Quaternion().setFromRotationMatrix(rotationMatrix);
Cubes.forEach(function(cube){
cube.applyMatrix4(rotationMatrix);
cube.position.sub(point);
cube.position.applyMatrix4(rotationMatrix);
cube.position.add(point);
cube.quaternion.multiply(rotationQuaternion);
});
which was utterly strange since it performed a rotation, then repeat the rotation about a pivot point, before performing the rotation for a third time (using quaternion representation no less). This could be fixed by simply understanding what’s going on and editing the code on your own.
Conclusion
I have no illusions about my level of proficiency in WebGL, but this experiment proves that ChatGPT lets us get to a functional level in a remarkably short time.









.
.
of order 8.


 be the projective variety defined by the homogeneous equation
be the projective variety defined by the homogeneous equation  . We define maps
. We define maps  as follows
as follows
 then since
then since  we have
we have  .
. is a product in the category of quasi-projective varieties.
is a product in the category of quasi-projective varieties. be a quasi-projective variety and
be a quasi-projective variety and  be morphisms. We will define the corresponding
be morphisms. We will define the corresponding  as follows. For each
as follows. For each  , there is an open neighbourhood U of w such that
, there is an open neighbourhood U of w such that  and
and  where
where ![F_0, F_1 \in k[T_0, \ldots, T_n]](https://s0.wp.com/latex.php?latex=F_0%2C+F_1+%5Cin+k%5BT_0%2C+%5Cldots%2C+T_n%5D&bg=ffffff&fg=333333&s=0&c=20201002) are homogeneous of the same degree and either
are homogeneous of the same degree and either  or
or  has no zero in U. Same holds for
has no zero in U. Same holds for ![G_0, G_1 \in k[T_0, \ldots, T_n]](https://s0.wp.com/latex.php?latex=G_0%2C+G_1+%5Cin+k%5BT_0%2C+%5Cldots%2C+T_n%5D&bg=ffffff&fg=333333&s=0&c=20201002) .
. by
by  . Clearly the image of f lies in V so we get a morphism
. Clearly the image of f lies in V so we get a morphism  . It is easy to see that
. It is easy to see that  and
and  . Repeating this construction over an open cover of W, we obtain our desired
. Repeating this construction over an open cover of W, we obtain our desired  . ♦
. ♦ , the product
, the product  exists in the category of quasi-projective varieties and is a projective variety.
exists in the category of quasi-projective varieties and is a projective variety. ,
, are indxed by
are indxed by  with
with  and
and  .
. .
. over all
over all  .
.  and
and  are open (resp. closed), so is the image of
are open (resp. closed), so is the image of  in
in  .
. and
and  and
and  ; without loss of generality say
; without loss of generality say  .
. is open in
is open in  there exists a homogeneous
there exists a homogeneous ![F \in k[A_0, \ldots, A_n]](https://s0.wp.com/latex.php?latex=F+%5Cin+k%5BA_0%2C+%5Cldots%2C+A_n%5D&bg=ffffff&fg=333333&s=0&c=20201002) such that
such that  . Similarly, there exists a homogeneous
. Similarly, there exists a homogeneous ![G \in k[B_0, \ldots, B_m]](https://s0.wp.com/latex.php?latex=G+%5Cin+k%5BB_0%2C+%5Cldots%2C+B_m%5D&bg=ffffff&fg=333333&s=0&c=20201002) such that
such that  . Then
. Then
 in V is open. ♦
in V is open. ♦ As in the
As in the  has the cofinite topology.
has the cofinite topology. (resp.
(resp.  ).
). are closed (resp. locally closed), so is the image W of
are closed (resp. locally closed), so is the image W of  and
and  then restrict to
then restrict to  and
and  .
. is the product of
is the product of  in the category of quasi-projective varieties.
in the category of quasi-projective varieties. ,
,  are any morphisms then
are any morphisms then  and
and  induce
induce  ; the image of f lies in W so we obtain an induced
; the image of f lies in W so we obtain an induced  . ♦
. ♦ be the set of points
be the set of points  satisfying
satisfying  . Find a set of homogeneous polynomials in
. Find a set of homogeneous polynomials in  which define the image of W.
which define the image of W. is closed if and only if its corresponding subset
is closed if and only if its corresponding subset  is the set of solutions of some bihomogeneous polynomials
is the set of solutions of some bihomogeneous polynomials ,
, as well as
as well as  .
.  in a quasi-projective variety V, there is an open neighbourhood U,
in a quasi-projective variety V, there is an open neighbourhood U,  , which is affine.
, which is affine. is a locally closed subset. Without loss of generality,
is a locally closed subset. Without loss of generality,  so
so  , a locally closed subset of
, a locally closed subset of  . Now W is open in
. Now W is open in  , its closure in
, its closure in ![\{D(f) : f\in k[\overline W]\}](https://s0.wp.com/latex.php?latex=%5C%7BD%28f%29+%3A+f%5Cin+k%5B%5Coverline+W%5D%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002) , where
, where
![f\in k[\overline W]](https://s0.wp.com/latex.php?latex=f%5Cin+k%5B%5Coverline+W%5D&bg=ffffff&fg=333333&s=0&c=20201002) we have
we have  . Now we are done since
. Now we are done since  is isomorphic to the affine variety with coordinate ring
is isomorphic to the affine variety with coordinate ring ![k[\overline W][T]/(T\cdot f - 1)](https://s0.wp.com/latex.php?latex=k%5B%5Coverline+W%5D%5BT%5D%2F%28T%5Ccdot+f+-+1%29&bg=ffffff&fg=333333&s=0&c=20201002) . ♦
. ♦ is also irreducible. Again, please be reminded that
is also irreducible. Again, please be reminded that  .
. and
and  . Then
. Then  is an open affine subset of the quasi-projective variety
is an open affine subset of the quasi-projective variety  .
. be a non-empty closed subset. Then
be a non-empty closed subset. Then  .
. ; by
; by  and V’ is a closed subset of
and V’ is a closed subset of  . Now there is an isomorphism
. Now there is an isomorphism
 . ♦
. ♦ , we have
, we have
 has height 1. Pick
has height 1. Pick  such that
such that  has annihilator
has annihilator  , i.e.
, i.e.  . Since bA is finitely generated, we localize both sides at
. Since bA is finitely generated, we localize both sides at  to obtain
to obtain  , the unique maximal ideal of
, the unique maximal ideal of  . Thus
. Thus
 . We claim that
. We claim that  ; if not,
; if not,  and by the adjugate matrix trick (see
and by the adjugate matrix trick (see  is integral over B. This contradicts the fact that B is normal. Hence
is integral over B. This contradicts the fact that B is normal. Hence  is an invertible ideal so B is a dvr, and
is an invertible ideal so B is a dvr, and  . ♦
. ♦ , we have
, we have  . Then
. Then ,
, .
. , where
, where  ,
,  ; we need to show
; we need to show  . Write
. Write  for its
for its  all of height 1. For each i we have
all of height 1. For each i we have  . But
. But  since all
since all  are minimal in
are minimal in  . Thus
. Thus
 . ♦
. ♦![A = k[V]](https://s0.wp.com/latex.php?latex=A+%3D+k%5BV%5D&bg=ffffff&fg=333333&s=0&c=20201002) for an irreducible affine variety V, and
for an irreducible affine variety V, and  be a prime ideal with corresponding subvariety
be a prime ideal with corresponding subvariety  . Prove that
. Prove that  is the set of all
is the set of all  holds for all domains; geometrically, this means if
holds for all domains; geometrically, this means if  (for irreducible V) is regular at each point, then f can be represented by the same polynomial globally. The condition in lemma 2 is notably stronger; geometrically, it says if f is regular on an open dense subset of every codimension 1 subvariety, then it is regular everywhere.
(for irreducible V) is regular at each point, then f can be represented by the same polynomial globally. The condition in lemma 2 is notably stronger; geometrically, it says if f is regular on an open dense subset of every codimension 1 subvariety, then it is regular everywhere. is normal if and only if the following conditions both hold.
is normal if and only if the following conditions both hold. .
.![k[V]](https://s0.wp.com/latex.php?latex=k%5BV%5D&bg=ffffff&fg=333333&s=0&c=20201002) is a normal domain.
is a normal domain. is a non-empty closed subset, corresponding to radical ideal
is a non-empty closed subset, corresponding to radical ideal ![\mathfrak a \subsetneq k[V]](https://s0.wp.com/latex.php?latex=%5Cmathfrak+a+%5Csubsetneq+k%5BV%5D&bg=ffffff&fg=333333&s=0&c=20201002) , the codimension of W in V is
, the codimension of W in V is  .
. is a non-empty closed subset of codimension at least 2, then the inclusion
is a non-empty closed subset of codimension at least 2, then the inclusion  induces an isomorphism of coordinate rings
induces an isomorphism of coordinate rings![k[V-W] \cong k[V]](https://s0.wp.com/latex.php?latex=k%5BV-W%5D+%5Ccong+k%5BV%5D&bg=ffffff&fg=333333&s=0&c=20201002) .
.![f \in k[V-W]](https://s0.wp.com/latex.php?latex=f+%5Cin+k%5BV-W%5D&bg=ffffff&fg=333333&s=0&c=20201002) , considered as a
, considered as a ![\mathfrak p \subset k[V]](https://s0.wp.com/latex.php?latex=%5Cmathfrak+p+%5Csubset+k%5BV%5D&bg=ffffff&fg=333333&s=0&c=20201002) of height 1, f is regular on
of height 1, f is regular on  , a dense open subset of
, a dense open subset of  . Hence by exercise A,
. Hence by exercise A,  and by Serre’s criterion, we have
and by Serre’s criterion, we have . ♦
. ♦ are as in proposition 1, then
are as in proposition 1, then  is not an affine variety.
is not an affine variety. induces an isomorphism
induces an isomorphism ![f^* : k[V] \to k[V-W]](https://s0.wp.com/latex.php?latex=f%5E%2A+%3A+k%5BV%5D+%5Cto+k%5BV-W%5D&bg=ffffff&fg=333333&s=0&c=20201002) . If V–W were affine, f would also be an isomorphism, which is absurd since f is not surjective. ♦
. If V–W were affine, f would also be an isomorphism, which is absurd since f is not surjective. ♦
 ) is the supremum of the lengths of all such chains.
) is the supremum of the lengths of all such chains. , the Krull dimension of X is the
, the Krull dimension of X is the  .
. be a chain of irreducible closed subsets of Y. Taking their closures in X we have
be a chain of irreducible closed subsets of Y. Taking their closures in X we have .
. is a closed irreducible subset of X. Furthermore by a general result in point-set topology (see
is a closed irreducible subset of X. Furthermore by a general result in point-set topology (see  in Y is
in Y is  . Hence
. Hence  so
so  for any i. Thus we get a chain of irreducible closed subsets of X of length k. ♦
for any i. Thus we get a chain of irreducible closed subsets of X of length k. ♦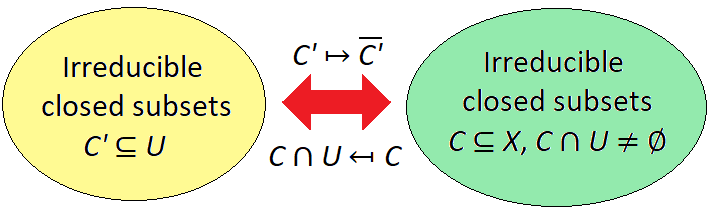
 is the closure of C’ in X.
is the closure of C’ in X. is a non-empty open subset of C; hence by
is a non-empty open subset of C; hence by  .
. is an irreducible component of X.
is an irreducible component of X. is an open cover for an irreducible space X, and each
is an open cover for an irreducible space X, and each  , then
, then  .
. . By proposition 2 we get a chain of irreducible closed subsets of
. By proposition 2 we get a chain of irreducible closed subsets of  of length k :
of length k : .
. . ♦
. ♦ .
. .
. . Since
. Since  is affine, by what we just showed
is affine, by what we just showed  . On the other hand
. On the other hand  by lemma 3, so equality holds throughout. ♦
by lemma 3, so equality holds throughout. ♦ is prime if and only if:
is prime if and only if: .
. such that
such that  . Since
. Since  , among all homogeneous components of a pick
, among all homogeneous components of a pick  of maximum degree such that
of maximum degree such that  ; similarly pick
; similarly pick  fo b so
fo b so  .
. mod
mod  , and by the given condition this means
, and by the given condition this means  or
or  , a contradiction. ♦
, a contradiction. ♦ of a graded ring A is primary if and only if
of a graded ring A is primary if and only if .
. ,
,  , where
, where ![B = k[T_0, \ldots, T_n]](https://s0.wp.com/latex.php?latex=B+%3D+k%5BT_0%2C+%5Cldots%2C+T_n%5D&bg=ffffff&fg=333333&s=0&c=20201002) .
. is prime.
is prime. . If
. If  are homogeneous, then
are homogeneous, then  and
and  are closed subsets of
are closed subsets of  :
: .
. where
where  be closed subsets with union V. Now write
be closed subsets with union V. Now write  and
and  for homogeneous radical ideals
for homogeneous radical ideals  . Then
. Then  . Since
. Since  is a homogeneous radical ideal,
is a homogeneous radical ideal,  . By
. By  or
or  . ♦
. ♦ is irreducible if and only if
is irreducible if and only if  is irreducible.
is irreducible. is prime. But
is prime. But  (from an exercise
(from an exercise ![F_0, \ldots, F_m \in k[T_0, \ldots, T_n]](https://s0.wp.com/latex.php?latex=F_0%2C+%5Cldots%2C+F_m+%5Cin+k%5BT_0%2C+%5Cldots%2C+T_n%5D&bg=ffffff&fg=333333&s=0&c=20201002) be homogeneous polynomials of the same degree. If
be homogeneous polynomials of the same degree. If  is such that not all
is such that not all  , then we can define a function on an open subset U of
, then we can define a function on an open subset U of  .
. we can find an open neighbourhood U of
we can find an open neighbourhood U of  . Also, if we replace projective coordinates
. Also, if we replace projective coordinates  with
with  , then each
, then each  where
where  so
so
 for the resulting function.
for the resulting function. and
and  be quasi-projective varieties and
be quasi-projective varieties and  be a function.
be a function. is regular at
is regular at  if there is an open neighbourhood U of
if there is an open neighbourhood U of  for some homogeneous
for some homogeneous ![F_i \in k[T_0, \ldots, T_n]](https://s0.wp.com/latex.php?latex=F_i+%5Cin+k%5BT_0%2C+%5Cldots%2C+T_n%5D&bg=ffffff&fg=333333&s=0&c=20201002) of the same degree.
of the same degree. , in which case we also say
, in which case we also say  and
and  are closed subsets.
are closed subsets. . A regular map
. A regular map  in the
in the  , e.g. take
, e.g. take  . Via embeddings
. Via embeddings  and
and  taking
taking  and
and  respectively, f can be
respectively, f can be 
 . This generalizes to an arbitrary regular map of closed subsets
. This generalizes to an arbitrary regular map of closed subsets  .
. be regular under the new definition. Then there exist polynomials
be regular under the new definition. Then there exist polynomials ![f_1, \ldots, f_m \in k[X_1, \ldots, X_n]](https://s0.wp.com/latex.php?latex=f_1%2C+%5Cldots%2C+f_m+%5Cin+k%5BX_1%2C+%5Cldots%2C+X_n%5D&bg=ffffff&fg=333333&s=0&c=20201002) which represent
which represent  , let
, let  be projection onto the i-th coordinate. Then
be projection onto the i-th coordinate. Then  is regular under the new definition, and by
is regular under the new definition, and by  can be represented as a polynomial
can be represented as a polynomial  . Hence we see that
. Hence we see that for polynomials
for polynomials  given by
given by
 works globally over the whole of
works globally over the whole of  . Let
. Let  be the closed subset defined by
be the closed subset defined by  . We define a map
. We define a map  as follows
as follows .
. .
.
 due to the equality
due to the equality  since we have the reverse map
since we have the reverse map .
. and
and  .
.![k[V] := \{ f : V\to \mathbb A^1 : f \text{ regular } \}](https://s0.wp.com/latex.php?latex=k%5BV%5D+%3A%3D+%5C%7B+f+%3A+V%5Cto+%5Cmathbb+A%5E1+%3A+f+%5Ctext%7B+regular+%7D+%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002) ,
,
 of quasi-projective varieties induces a ring homomorphism
of quasi-projective varieties induces a ring homomorphism ![\phi^* : k[W] \to k[V]](https://s0.wp.com/latex.php?latex=%5Cphi%5E%2A+%3A+k%5BW%5D+%5Cto+k%5BV%5D&bg=ffffff&fg=333333&s=0&c=20201002) . By lemma 2, when V is affine
. By lemma 2, when V is affine  , we have an automorphism
, we have an automorphism 
 for
for  . Also
. Also  if and only if g is a scalar multiple of the identity matrix, so we get an injective homomorphism
if and only if g is a scalar multiple of the identity matrix, so we get an injective homomorphism  . In fact this is an isomorphism of groups.
. In fact this is an isomorphism of groups.![\left[\begin{pmatrix} a & b \\ c & d \end{pmatrix} \in GL_2 k \right] : (t_0 : t_1) \mapsto (at_0 + bt_1 : ct_0 + dt_1).](https://s0.wp.com/latex.php?latex=%5Cleft%5B%5Cbegin%7Bpmatrix%7D+a+%26+b+%5C%5C+c+%26+d+%5Cend%7Bpmatrix%7D+%5Cin+GL_2+k+%5Cright%5D+%3A+%28t_0+%3A+t_1%29+%5Cmapsto+%28at_0+%2B+bt_1+%3A+ct_0+%2B+dt_1%29.&bg=ffffff&fg=333333&s=0&c=20201002)
 and
and  via the maps
via the maps
 is an affine variety even though it is not closed in
is an affine variety even though it is not closed in  . From the isomorphism we also have:
. From the isomorphism we also have:![k[\mathbb A^1 - \{0\}] \cong k[V] = k[X, Y]/(XY - 1) \implies k[\mathbb A^1 - \{0\}] = k[X, \frac 1 X].](https://s0.wp.com/latex.php?latex=k%5B%5Cmathbb+A%5E1+-+%5C%7B0%5C%7D%5D+%5Ccong+k%5BV%5D+%3D+k%5BX%2C+Y%5D%2F%28XY+-+1%29+%5Cimplies+k%5B%5Cmathbb+A%5E1+-+%5C%7B0%5C%7D%5D+%3D+k%5BX%2C+%5Cfrac+1+X%5D.&bg=ffffff&fg=333333&s=0&c=20201002)
 . We will show that V is not affine. Indeed consider the injection
. We will show that V is not affine. Indeed consider the injection  which induces
which induces![\phi^* : k[X, Y] \cong k[\mathbb A^2] \longrightarrow k[V]](https://s0.wp.com/latex.php?latex=%5Cphi%5E%2A+%3A+k%5BX%2C+Y%5D+%5Ccong+k%5B%5Cmathbb+A%5E2%5D+%5Clongrightarrow+k%5BV%5D&bg=ffffff&fg=333333&s=0&c=20201002) .
. . Let us show that it is surjective. Suppose
. Let us show that it is surjective. Suppose ![f \in k[V]](https://s0.wp.com/latex.php?latex=f+%5Cin+k%5BV%5D&bg=ffffff&fg=333333&s=0&c=20201002) so that
so that  is regular. Write
is regular. Write where
where  .
.![f|_U \in k[U] \cong k[X, Y, \frac 1 X]](https://s0.wp.com/latex.php?latex=f%7C_U+%5Cin+k%5BU%5D+%5Ccong+k%5BX%2C+Y%2C+%5Cfrac+1+X%5D&bg=ffffff&fg=333333&s=0&c=20201002) and
and ![f|_{U'} \in k[U']\cong k[X, Y, \frac 1 Y]](https://s0.wp.com/latex.php?latex=f%7C_%7BU%27%7D+%5Cin+k%5BU%27%5D%5Ccong+k%5BX%2C+Y%2C+%5Cfrac+1+Y%5D&bg=ffffff&fg=333333&s=0&c=20201002) . Since
. Since  are all dense in V we have injections
are all dense in V we have injections ![k[V] \to k[U] \to k[U\cap U']](https://s0.wp.com/latex.php?latex=k%5BV%5D+%5Cto+k%5BU%5D+%5Cto+k%5BU%5Ccap+U%27%5D&bg=ffffff&fg=333333&s=0&c=20201002) and
and ![k[V] \to k[U'] \to k[U\cap U']](https://s0.wp.com/latex.php?latex=k%5BV%5D+%5Cto+k%5BU%27%5D+%5Cto+k%5BU%5Ccap+U%27%5D&bg=ffffff&fg=333333&s=0&c=20201002) so that
so that ![f \in k[X, Y, \frac 1 X] \cap k[X, Y, \frac 1 Y]](https://s0.wp.com/latex.php?latex=f+%5Cin+k%5BX%2C+Y%2C+%5Cfrac+1+X%5D+%5Ccap+k%5BX%2C+Y%2C+%5Cfrac+1+Y%5D&bg=ffffff&fg=333333&s=0&c=20201002) . It is easy to show that this means
. It is easy to show that this means ![f\in k[X, Y]](https://s0.wp.com/latex.php?latex=f%5Cin+k%5BX%2C+Y%5D&bg=ffffff&fg=333333&s=0&c=20201002) .
.![k[\mathbb A^2] \to k[V]](https://s0.wp.com/latex.php?latex=k%5B%5Cmathbb+A%5E2%5D+%5Cto+k%5BV%5D&bg=ffffff&fg=333333&s=0&c=20201002) . If V is affine, by
. If V is affine, by  . On the set
. On the set  , we consider the equivalence relation:
, we consider the equivalence relation:
 for any representative
for any representative  .
. .
. is homogeneous and
is homogeneous and  . We write
. We write  if
if  .
. is in general not well-defined. Indeed if we have two representatives
is in general not well-defined. Indeed if we have two representatives  for
for 
 if and only if
if and only if  be a
be a  .
. we also write
we also write  for
for  where
where  .
. .
. and collection of graded ideals
and collection of graded ideals  of B.
of B. .
. is a set of homogeneous generators of
is a set of homogeneous generators of  .
. .
. .
. .
.

 the same point can be represented by
the same point can be represented by  where the i-th coordinate is 1. This gives a bijection
where the i-th coordinate is 1. This gives a bijection  . E.g. for n = 2, we have:
. E.g. for n = 2, we have:
 , the intersection
, the intersection  maps to an open subset of
maps to an open subset of  and
and  . Indeed if i < j then
. Indeed if i < j then  is the set of all
is the set of all  satisfying
satisfying  while
while  is the set of all
is the set of all  . Hence, the following is well-defined.
. Hence, the following is well-defined. as an open subset, where
as an open subset, where  .
. , the set
, the set  is (Zariski) closed in
is (Zariski) closed in  is closed in
is closed in  . But
. But  , where
, where ![f(X_1, \ldots, X_n) = F(1, X_1, \ldots, X_n) \in k[X_1, \ldots, X_n]](https://s0.wp.com/latex.php?latex=f%28X_1%2C+%5Cldots%2C+X_n%29+%3D+F%281%2C+X_1%2C+%5Cldots%2C+X_n%29+%5Cin+k%5BX_1%2C+%5Cldots%2C+X_n%5D&bg=ffffff&fg=333333&s=0&c=20201002) . The same holds for
. The same holds for  . ♦
. ♦![f \in k[X_1, \ldots, X_n]](https://s0.wp.com/latex.php?latex=f+%5Cin+k%5BX_1%2C+%5Cldots%2C+X_n%5D&bg=ffffff&fg=333333&s=0&c=20201002) , let
, let
![f,g\in k[X_1, \ldots, X_n]](https://s0.wp.com/latex.php?latex=f%2Cg%5Cin+k%5BX_1%2C+%5Cldots%2C+X_n%5D&bg=ffffff&fg=333333&s=0&c=20201002) , the homogenization of fg is the product of the homogenizations of f and g.
, the homogenization of fg is the product of the homogenizations of f and g.![F\in k[T_0, \ldots, T_n]](https://s0.wp.com/latex.php?latex=F%5Cin+k%5BT_0%2C+%5Cldots%2C+T_n%5D&bg=ffffff&fg=333333&s=0&c=20201002) be the homogenization of a non-constant
be the homogenization of a non-constant  for some graded ideal
for some graded ideal  . Since
. Since  , by lemma 1 this is Zariski closed.
, by lemma 1 this is Zariski closed. ; it suffices to show that any
; it suffices to show that any  is contained in
is contained in  for some homogeneous
for some homogeneous  without loss of generality. Hence
without loss of generality. Hence  for some
for some  , then
, then , where F = homogenization of f. ♦
, where F = homogenization of f. ♦ be the projective variety defined by the homogeneous equation
be the projective variety defined by the homogeneous equation  . Then
. Then is cut out from
is cut out from  by
by  ;
; is cut out from
is cut out from  ;
; is cut out from
is cut out from  .
. be any subset. The cone of C is
be any subset. The cone of C is .
. we have
we have
 is a proper graded ideal then
is a proper graded ideal then  .
. is closed in
is closed in  .
. . Now pick a set of homogeneous generators
. Now pick a set of homogeneous generators  for
for  .
. is of the form
is of the form  .
. .
. . Let
. Let  so that
so that  . It remains to show
. It remains to show  by lemma 2.
by lemma 2. , write
, write  as a sum of homogeneous components. Then for any
as a sum of homogeneous components. Then for any  and
and  we have
we have  which gives
which gives
 vanish for any
vanish for any  . ♦
. ♦
 , the ideal
, the ideal  is graded. Conversely, if
is graded. Conversely, if ![\mathfrak a\subsetneq k[T_0, \ldots, T_n]](https://s0.wp.com/latex.php?latex=%5Cmathfrak+a%5Csubsetneq+k%5BT_0%2C+%5Cldots%2C+T_n%5D&bg=ffffff&fg=333333&s=0&c=20201002) is graded,
is graded,  is the (non-empty) solution set of a collection of graded polynomials; hence it is a closed cone too.
is the (non-empty) solution set of a collection of graded polynomials; hence it is a closed cone too.![\mathfrak a \subsetneq B = k[T_0, \ldots, T_n]](https://s0.wp.com/latex.php?latex=%5Cmathfrak+a+%5Csubsetneq+B+%3D+k%5BT_0%2C+%5Cldots%2C+T_n%5D&bg=ffffff&fg=333333&s=0&c=20201002) .
. and so
and so
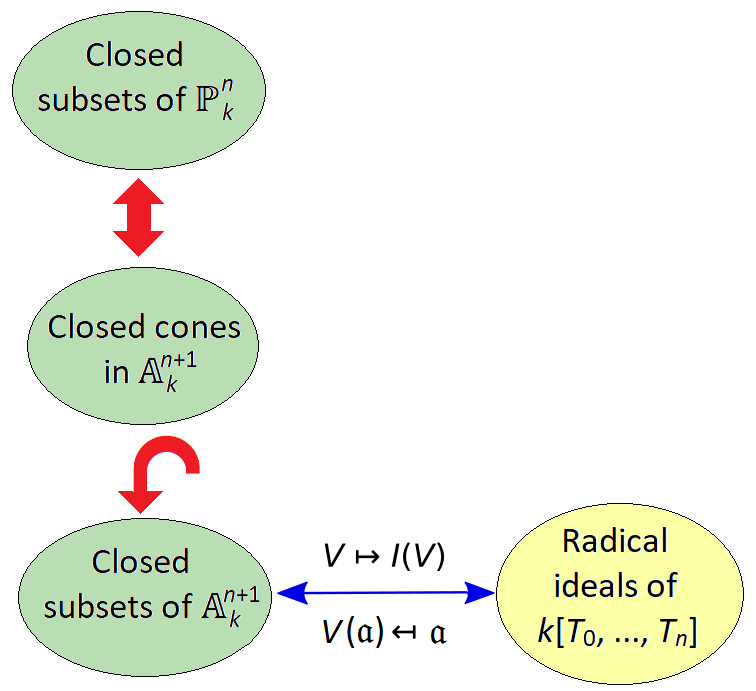
 which takes closed subsets of
which takes closed subsets of  .
. so we modify our bijection to:
so we modify our bijection to: is the irrelevant ideal of B.
is the irrelevant ideal of B.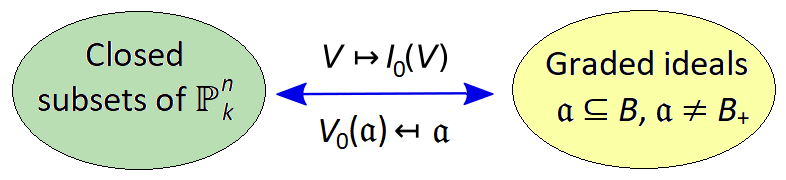
 .
. be a proper ideal. A primary decomposition of
be a proper ideal. A primary decomposition of 
 is
is  , i.e.
, i.e.  .
. is
is  ,
, .
. is the
is the  . By
. By  is
is  and
and  , then
, then  is a zero-divisor of
is a zero-divisor of  .
. , suppose
, suppose  ; then
; then  is a zero-divisor for
is a zero-divisor for  and we have
and we have  . Conversely, if
. Conversely, if  is an associated prime of
is an associated prime of  .
. and
and  . For some n > 0,
. For some n > 0,  . But
. But  so by the given condition
so by the given condition  and
and  .
. . First,
. First,  .
. and
and  are such that
are such that  , then by the given condition
, then by the given condition  . ♦
. ♦ is primary if:
is primary if: .
. is a ring homomorphism and
is a ring homomorphism and  is a primary ideal, then
is a primary ideal, then  is a primary ideal of A. Also
is a primary ideal of A. Also  .
. , there is a bijection between primary ideals of A containing
, there is a bijection between primary ideals of A containing  .
. is a fixed multiplicative subset.
is a fixed multiplicative subset. such that
such that  ;
;
 , then
, then .
. is primary and
is primary and  is primary, and
is primary, and .
. is a proper ideal since
is a proper ideal since  satisfy
satisfy  ; then for some
; then for some  we have
we have  . Since
. Since  .
. . Conversely let
. Conversely let  satisfy
satisfy  . For some
. For some  we have
we have  . As above
. As above  so
so  . ♦
. ♦
 for each i. If
for each i. If  .
. at
at  . But since
. But since  .
. . By proposition 2 this gives
. By proposition 2 this gives  which is uniquely determined by
which is uniquely determined by  is maximal, then
is maximal, then  for some n > 0.
for some n > 0.![A =k[X, Y, Z]/(Z^2 - XY)](https://s0.wp.com/latex.php?latex=A+%3Dk%5BX%2C+Y%2C+Z%5D%2F%28Z%5E2+-+XY%29&bg=ffffff&fg=333333&s=0&c=20201002) with
with  , which is prime since
, which is prime since![A/\mathfrak p \cong k[X, Y, Z]/(Z^2 - XY, X, Z) \cong k[Y]](https://s0.wp.com/latex.php?latex=A%2F%5Cmathfrak+p+%5Ccong+k%5BX%2C+Y%2C+Z%5D%2F%28Z%5E2+-+XY%2C+X%2C+Z%29+%5Ccong+k%5BY%5D&bg=ffffff&fg=333333&s=0&c=20201002) .
. is not primary because
is not primary because  but
but  and
and  .
.![A = k[X, Y]](https://s0.wp.com/latex.php?latex=A+%3D+k%5BX%2C+Y%5D&bg=ffffff&fg=333333&s=0&c=20201002) and
and  , the A-module
, the A-module  .
. is prime and hence primary;
is prime and hence primary; is a power of the maximal ideal
is a power of the maximal ideal  ; by exercise B.2 it is primary;
; by exercise B.2 it is primary; so
so  is primary by exercise B.2.
is primary by exercise B.2. . Geometrically, the k-scheme with coordinate ring
. Geometrically, the k-scheme with coordinate ring 
![A = k[X, Y, Z]](https://s0.wp.com/latex.php?latex=A+%3D+k%5BX%2C+Y%2C+Z%5D&bg=ffffff&fg=333333&s=0&c=20201002) with
with  . Then
. Then![k[X, Y, Z]/(X - YZ) \cong k[Y, Z], \ X \mapsto YZ \implies k[X, Y, Z]/\mathfrak a \cong k[Y, Z]/(Y^2 Z)](https://s0.wp.com/latex.php?latex=k%5BX%2C+Y%2C+Z%5D%2F%28X+-+YZ%29+%5Ccong+k%5BY%2C+Z%5D%2C+%5C+X+%5Cmapsto+YZ+%5Cimplies+k%5BX%2C+Y%2C+Z%5D%2F%5Cmathfrak+a+%5Ccong+k%5BY%2C+Z%5D%2F%28Y%5E2+Z%29&bg=ffffff&fg=333333&s=0&c=20201002) .
. , an intersection of primary ideals with
, an intersection of primary ideals with  and
and  . This translates to
. This translates to
 and
and  is already prime.
is already prime. . Then each of
. Then each of  and
and  is primary (the first ideal is prime; the remaining two ideals are powers of a maximal ideal). Hence this gives a primary decomposition of
is primary (the first ideal is prime; the remaining two ideals are powers of a maximal ideal). Hence this gives a primary decomposition of  , with the latter two embedded.
, with the latter two embedded.
 ,
,  ,
,  be ideals of A. Set
be ideals of A. Set  . Prove that
. Prove that

 as A-modules for prime ideals
as A-modules for prime ideals  .
. . Since
. Since  by
by  . If equality holds, we are done. Otherwise, let
. If equality holds, we are done. Otherwise, let  be the image of the map and repeat with
be the image of the map and repeat with  to obtain a submodule
to obtain a submodule  . Repeating this process, this must eventually terminate since we cannot have an infinite ascending chain of submodules
. Repeating this process, this must eventually terminate since we cannot have an infinite ascending chain of submodules  . ♦
. ♦ be as in proposition 1 with
be as in proposition 1 with  for some prime
for some prime  .
. is finite.
is finite.
 for each i, we are done. ♦
for each i, we are done. ♦ , then there is a map
, then there is a map  and so
and so  . Hence we have shown:
. Hence we have shown: .
. then
then  .
.
 ; but since
; but since  so
so
![M = k[X, Y]/(X^2, XY)](https://s0.wp.com/latex.php?latex=M+%3D+k%5BX%2C+Y%5D%2F%28X%5E2%2C+XY%29&bg=ffffff&fg=333333&s=0&c=20201002) , considered as an A-module. Note that
, considered as an A-module. Note that  with radical
with radical  .
. . Indeed we have:
. Indeed we have:
 and
and  with
with  . Then
. Then  ; as shown above,
; as shown above,  . Also
. Also  so by corollary 1
so by corollary 1 .
. with
with  but
but  .
. of all submodules
of all submodules  such that
such that  . Note that
. Note that .
. .
. .
. then
then  so the above intersection only needs to be taken over
so the above intersection only needs to be taken over  . If
. If  it has an associated prime
it has an associated prime  we have
we have  , a contradiction. ♦
, a contradiction. ♦ .
. . Since
. Since  we have
we have  . On the other hand if
. On the other hand if  , then we have an injection
, then we have an injection  whose image is of the form
whose image is of the form  . But now
. But now
 . Hence no such
. Hence no such  .
.
 is a
is a  ,
,  . It is minimal if it is irredundant and all
. It is minimal if it is irredundant and all  ,
,  must be a maximal element of
must be a maximal element of  are
are  .
. the canonical map
the canonical map  is injective. Hence
is injective. Hence ♦
♦ then among the injections
then among the injections  and
and  , we have
, we have  since
since  are disjoint. Thus
are disjoint. Thus is injective
is injective , contradicting the condition of irredundancy. ♦
, contradicting the condition of irredundancy. ♦ to be distinct.
to be distinct.

 is a
is a  , every non-zero ideal is an intersection of
, every non-zero ideal is an intersection of  , ideals generated by prime powers.
, ideals generated by prime powers. in A is
in A is ,
, ,
, , we say M is a faithful A-module.
, we say M is a faithful A-module. , then M can be regarded as a faithful
, then M can be regarded as a faithful  , let
, let .
.
 in terms of annihilators.
in terms of annihilators. if P is a finitely generated submodule of M.
if P is a finitely generated submodule of M. .
.

 .
. we have
we have  is zero if and only if there exists
is zero if and only if there exists  such that
such that  , equivalently if there exists
, equivalently if there exists  . Hence
. Hence  if and only if
if and only if  .
. generate M as an A-module. Then
generate M as an A-module. Then
 if and only if it contains either
if and only if it contains either  is a short exact sequence of A-modules, then
is a short exact sequence of A-modules, then  .
. .
. if and only if both terms are zero whereas
if and only if both terms are zero whereas  if and only if at least one term is zero.
if and only if at least one term is zero. and it follows that
and it follows that  if and only if
if and only if  .
.
 or
or  , clearly the RHS is zero. Conversely if both are non-zero, since they are finitely generated
, clearly the RHS is zero. Conversely if both are non-zero, since they are finitely generated  and
and  . But these are vector spaces over
. But these are vector spaces over  so we have
so we have![k(\mathfrak p) \otimes_A N \otimes_A P = [k(\mathfrak p) \otimes_A N] \otimes_{k(\mathfrak p)} [k(\mathfrak p) \otimes_A P] \ne 0 \implies (N\otimes_A P)_{\mathfrak p} \ne 0.](https://s0.wp.com/latex.php?latex=k%28%5Cmathfrak+p%29+%5Cotimes_A+N+%5Cotimes_A+P+%3D+%5Bk%28%5Cmathfrak+p%29+%5Cotimes_A+N%5D+%5Cotimes_%7Bk%28%5Cmathfrak+p%29%7D+%5Bk%28%5Cmathfrak+p%29+%5Cotimes_A+P%5D+%5Cne+0+%5Cimplies+%28N%5Cotimes_A+P%29_%7B%5Cmathfrak+p%7D+%5Cne+0.&bg=ffffff&fg=333333&s=0&c=20201002) ♦
♦ be a homomorphism of finitely generated A-modules; prove that
be a homomorphism of finitely generated A-modules; prove that  is a closed subset of Spec A.
is a closed subset of Spec A.
 for some
for some  is
is  . There is a bijection
. There is a bijection .
. by considering
by considering  .
. such that
such that  ; we need to show a is contained in an associated prime of M.
; we need to show a is contained in an associated prime of M. be the set of ideals of A containing a of the form
be the set of ideals of A containing a of the form  for
for  . Since A is noetherian and
. Since A is noetherian and  , there is a maximal
, there is a maximal  . We will show
. We will show  for some
for some  .
. such that
such that  and
and  . Since
. Since  , we have
, we have  . And since
. And since  , by maximality of
, by maximality of  we have
we have  . ♦
. ♦ be a short exact sequence of A-modules. Then
be a short exact sequence of A-modules. Then
 . The first containment in the claim is obvious. For the second, suppose we have an A-linear map
. The first containment in the claim is obvious. For the second, suppose we have an A-linear map  .
. , then any non-zero
, then any non-zero  has annihilator
has annihilator  . If
. If  , then composing
, then composing  is still injective, so
is still injective, so  . ♦
. ♦ .
.
 , then localization at S gives an A-linear map
, then localization at S gives an A-linear map  .
. -linear map
-linear map  where
where  is prime. By
is prime. By  for some prime
for some prime  we let
we let  be the image of 1. It remains to show: there exists
be the image of 1. It remains to show: there exists  such that
such that  .
. , we have
, we have  in
in  so that
so that  in M for some
in M for some  . Pick a generating set
. Pick a generating set  of
of  with
with  . Then
. Then  satisfies
satisfies  .
. then
then  so
so  lies in the annihilator of
lies in the annihilator of  ; since
; since 