
First, suppose (X, d) is a metric space. If Y is a subset of X, then one can restrict the metric to 

The open subsets of Y are related to those of X as follows.
Proposition. A subset
is open if and only if
for some open
.
Proof.
First note that if 

- Suppose U is open in X and V = U ∩ Y. Each
is also in U, and so
for some ε>0. Hence
. So V is open in Y.
- Conversely, let V be open in Y. For each a in V, we have
for some ε>0 depending on a. Take the union U of all such
; then U is open in X since it’s a union of open balls in X. Also

Exercise
If U is an open ball in X, is U ∩ Y necessarily an open ball in Y?
[ Answer (highlight to read): no, consider X=R and Y=R-{0}. Then (-1, +1) is an open ball N(0, 1) in X but (-1, +1) ∩ Y is the disjoint union of (-1, 0) and (0, +1) which is not an open ball in Y. ]
This inspires us to extend the definition of subspaces to general topological spaces.
Definition. Let (X, T) be a topological space and Y be a subset of X. The subspace topology on Y is defined by:
i.e.

Equivalently, the class of closed subsets of Y is given by D = Y – (U∩Y) = (X–U) ∩ Y = C ∩ Y for some closed subset C of X.
Examples
- A subspace of (X, d) with the discrete metric is still discrete.
- Pick the half-open interval
. Then
is open in Y but not open in R.
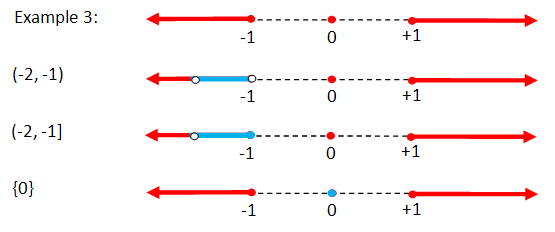
- Consider the subset
of the real line R. The singleton set {0} is an open subset of Y since {0} = N(0, 1/2). Furthermore, it is closed since the complement is a union of two open subsets.
- Consider the subset Z of R under the usual metric. Then the resulting subspace is the discrete space even though the induced metric d(m, n) = |m–n| is not exactly the discrete metric.
- Let
and Y be the set of points (x, y) satisfying
. Geometrically, Y is a circle. Here, we’ll think of it as a topological space with the subspace topology inherited from X. The space is denoted
. More generally, for each positive integer n, the space
is the subspace of
comprising of all points
satisfying
- Consider X = N under the right order topology.
- If Y = {1, 2, 3}, then the subspace topology gives { (empty set), {3}, {2, 3}, Y }.
- If Y is the set of even numbers, then the bijection
preserves the structure of topological spaces. We say that the two spaces are homeomorphic. We will say more about this in a later article.

 Since we’re often dealing with multiple spaces and subspaces, when describing open/closed subsets, it’s essential to qualify with “(XX) is open/closed in (YY)” instead of merely saying “(XX) is open”. E.g. in example 2 above, Y = [0, 1) is a subspace of R and the subset [0, 1/2) is open in Y but not in R.
Since we’re often dealing with multiple spaces and subspaces, when describing open/closed subsets, it’s essential to qualify with “(XX) is open/closed in (YY)” instead of merely saying “(XX) is open”. E.g. in example 2 above, Y = [0, 1) is a subspace of R and the subset [0, 1/2) is open in Y but not in R.
The following diagram illustrates some open subsets of Y in example 3.
Exercises
- Consider the subspace Y = {1/n : n positive integer} of R, under the usual metric. Is this space discrete? What about
?
- Example 2 gives us the concept of clopen subsets, i.e. subsets of a topological space which are both open and closed. In any topological space X,
and X are always clopen. Are there any other clopen subsets of Q, where Q inherits the subspace topology from R?
Answers
- Y is discrete since each {1/n} = (1/n – ε, 1/n + ε) ∩ Y for some small ε>0. On the other hand Y* is not discrete since any open subset containing 0 must also contain some 1/n.
- Yes, Q has infinitely (in fact, uncountably) many clopen subsets. If r is irrational, then (-∞, r) ∩ Q and (r, ∞) ∩ Q form a disjoint union of Q by open subsets.
 Basic Properties of Subspaces
Basic Properties of Subspaces

The following basic property is often taken for granted.
Theorem. If (X, T) is a topological space and
are subsets, then we can form the subspace topology on Z in two ways:
- by taking the subspace topology
from
; and
- by taking successive subspaces
which is a topology on Y, then
.
The two topologies are identical.
The proof is straightforward: in the first case, the class of all open subsets of Z is given by U ∩ Z for open subsets U of X; in the second case, the class is given by (U ∩ Y) ∩ Z = U ∩ Z for open subsets U of X. They’re identical. ♦
The following properties are also surprisingly useful in practice.
Theorem. Let Y be a subspace of (X, T). If Y is open in X, then any open subset of Y is an open subset of X. If Y is closed in X, then any closed subset of Y is a closed subset of X.
Proof.
For the first statement, an open subset of Y is of the form V = U ∩ Y for some open subset U of X. Since U and Y are both open in X, so is V = U ∩ Y. The same proof holds for the second statement by replacing ‘open’ with ‘closed’. ♦
Furthermore, for bases and subbases, we have:
Theorem. Let
be a topological space with subspace
.
- If B is a basis for T, then
is a basis for Y.
- If S is a subbasis for T, then
is a subbasis for Y.

Proof.
For the first statement, we first verify that 
- Any two elements of
for some basic open subsets
. Since B is a basis,
for some
. This gives
which is a union of elements in

Finally, we need to show 
- Every element
(for some element U in B) is open in Y by definition. So
.
- Conversely, any element of
for some open subset U of X. Since B is a basis for (X, T),
for some
. So
which is a union of elements in
This concludes the proof for the first statement.
For the second, suppose the intersections of finitely many elements of S form basis B. It suffices to show that the intersections of finitely many elements of 
- In one direction, note that
.
- Conversely, any element of
. So
for finitely many
. But this gives
for finitely many
.
And the proof is complete. ♦
Summary.
- Any subset of a topological space X inherits a topology from it. The inheritance is consistent across inclusion chains of topological spaces.
- With spaces and subspaces, one should be more careful when talking about “open sets”, i.e. mention what it’s open in.
- If Y is open (resp. closed) in X and Z is open (resp. closed) in Y, then Z is open (resp. closed) in X.
- If Y is a subspace of X, then a basis (resp. subbasis) of X restrict to give a basis (resp. subbasis) of Y.
 is contained in some open ball
is contained in some open ball  for some ε>0 which depends on x; hence U is the union of all these N(x, ε).
for some ε>0 which depends on x; hence U is the union of all these N(x, ε). such that every open subset U of X is a union
such that every open subset U of X is a union  a basic open set.
a basic open set.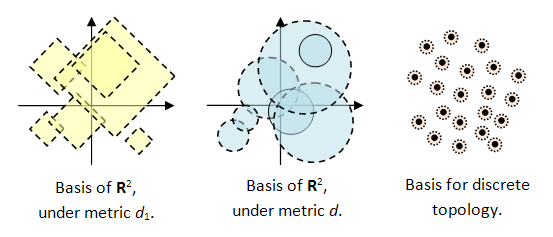
 is some collection of subsets of X. Is it always the basis of some topology?
is some collection of subsets of X. Is it always the basis of some topology?
 , so no problem there; for X, we need to specify that
, so no problem there; for X, we need to specify that  .
. (where each
(where each  ) is also of the form
) is also of the form  which lies in T.
which lies in T. and
and  , with each
, with each  . Since intersection is distributive over union, we get:
. Since intersection is distributive over union, we get:
 for all
for all  . On the other hand, this condition is obviously necessary since if
. On the other hand, this condition is obviously necessary since if  . Thus we have proven:
. Thus we have proven: is a union of elements from B.
is a union of elements from B. corresponds to solutions of simultaneous linear congruences
corresponds to solutions of simultaneous linear congruences  ,
,  . From elementary number theory, this intersection is either empty or V(e, f) for some integers e, f (where e = lcm(a, c)). Since V(1, 0) = Z, {V(a, b)} forms a basis for some topology T on Z.
. From elementary number theory, this intersection is either empty or V(e, f) for some integers e, f (where e = lcm(a, c)). Since V(1, 0) = Z, {V(a, b)} forms a basis for some topology T on Z.
 is a collection of topologies on X, one easily checks that so is
is a collection of topologies on X, one easily checks that so is  where a subset of X is open in T if and only if it’s open in all Ti. In short, an intersection of topologies is still a topology; so given any subset
where a subset of X is open in T if and only if it’s open in all Ti. In short, an intersection of topologies is still a topology; so given any subset  , one can consider the collection of all topologies containing S (this is a non-empty collection since it includes the discrete topology) and take their intersection.
, one can consider the collection of all topologies containing S (this is a non-empty collection since it includes the discrete topology) and take their intersection. ;
; .
.
 , we have
, we have  too, since T is the smallest topology containing S.
too, since T is the smallest topology containing S. , for some
, for some  , then since
, then since  , we have
, we have  as well. Thus,
as well. Thus,  . ♦
. ♦
 be the power set of X (i.e. set of all subsets of X). A topology on X is a subset
be the power set of X (i.e. set of all subsets of X). A topology on X is a subset  satisfying:
satisfying: ;
; , then
, then  ;
; is a collection of elements of T, then
is a collection of elements of T, then  .
. are open, then so is
are open, then so is  . In other words, a topology is closed under an intersection of finitely many terms, but not infinitely many terms in general (see the example of R later, where the intersection of all
. In other words, a topology is closed under an intersection of finitely many terms, but not infinitely many terms in general (see the example of R later, where the intersection of all  is {0}, which is not open).
is {0}, which is not open). are closed subsets of X;
are closed subsets of X; are closed subsets of X, then so
are closed subsets of X, then so  is closed;
is closed; is a collection of closed subsets of X, then
is a collection of closed subsets of X, then  is closed.
is closed. are both topologies on X. If
are both topologies on X. If  , then we say
, then we say  is a finer topology than
is a finer topology than  and conversely
and conversely 
 , which is the coarsest topology possible for X.
, which is the coarsest topology possible for X. . The standard topology on X was already defined
. The standard topology on X was already defined  for m=1, 2, 3, … . Note that
for m=1, 2, 3, … . Note that  and
and  ; the fact that the order topology is closed under arbitrary union follows from that every subset of N has a minimum.
; the fact that the order topology is closed under arbitrary union follows from that every subset of N has a minimum. , where ∞ is just a dummy symbol here, then we can define a topology on N* by decreeing that the only non-empty open subsets are
, where ∞ is just a dummy symbol here, then we can define a topology on N* by decreeing that the only non-empty open subsets are  Thus, any open subset containing ∞ contains all sufficiently large natural numbers.
Thus, any open subset containing ∞ contains all sufficiently large natural numbers.
 such that:
such that: .
. and
and  . [ See diagram below. ]
. [ See diagram below. ] where
where  is the highest power of p dividing m; in the case m=0, since all powers of p divide m we have
is the highest power of p dividing m; in the case m=0, since all powers of p divide m we have  . Then
. Then  is a metric, called the p-adic metric on Z. This was briefly alluded to in a
is a metric, called the p-adic metric on Z. This was briefly alluded to in a 

 for some ε>0. Then the collection of open sets form a topology.
for some ε>0. Then the collection of open sets form a topology. are open (in the sense of metric space). If
are open (in the sense of metric space). If  , then x lies in both U1 and U2. Thus, we can find
, then x lies in both U1 and U2. Thus, we can find  such that:
such that: and
and  .
. .
. be open and
be open and  . If x lies in U, then it must lie in some Ui. Thus, for some ε>0,
. If x lies in U, then it must lie in some Ui. Thus, for some ε>0,  . ♦
. ♦ induces the topology on Rn defined earlier;
induces the topology on Rn defined earlier; ;
; ;
; , i.e. it is open in the metric space (X, d). Then for any x in U,
, i.e. it is open in the metric space (X, d). Then for any x in U,  for some ε>0. By the first condition,
for some ε>0. By the first condition,  for some δ>0. Hence it follows that U is open in the metric space (X, d’) too.
for some δ>0. Hence it follows that U is open in the metric space (X, d’) too. is open in T, it is also open in T’. Hence
is open in T, it is also open in T’. Hence  for some δ>0. ♦
for some δ>0. ♦
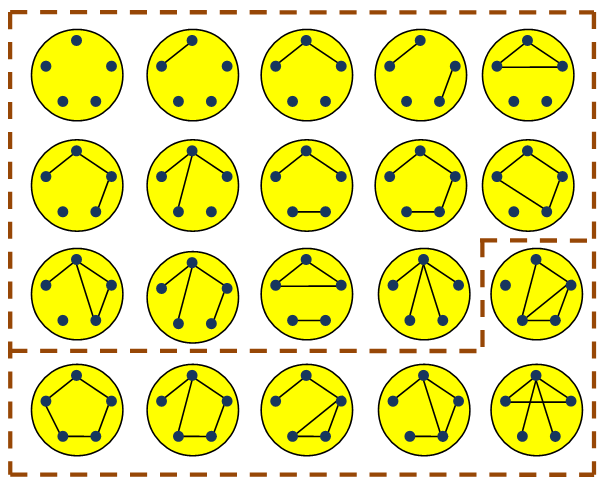
 then acts on E. Each graph corresponds to a colouring of E by Y = {black, white} and two graphs are isomorphic if and only if they’re isotopic under G – i.e. belong to the same orbit under G. Our objective is to compute the number of unique colourings by applying Polya enumeration theorem.
then acts on E. Each graph corresponds to a colouring of E by Y = {black, white} and two graphs are isomorphic if and only if they’re isotopic under G – i.e. belong to the same orbit under G. Our objective is to compute the number of unique colourings by applying Polya enumeration theorem.
 acts on X by permuting the edges around.
acts on X by permuting the edges around. .
. , the number of isomorphic classes of simple graphs with 5 vertices and i edges.
, the number of isomorphic classes of simple graphs with 5 vertices and i edges. . Burnside’s lemma gives:
. Burnside’s lemma gives:
 for each g.
for each g. , this is just
, this is just  .
. . For the remaining 4 singleton orbits, we get a factor of
. For the remaining 4 singleton orbits, we get a factor of  , so the summand is
, so the summand is  .
. while the singleton set contributes (1+t), hence the summand is
while the singleton set contributes (1+t), hence the summand is  .
.

 . Thus, there are 1 graph with 1 edge, 2 graphs with 2 edges, 4 graphs with 3 edges, … up to isomorphism.
. Thus, there are 1 graph with 1 edge, 2 graphs with 2 edges, 4 graphs with 3 edges, … up to isomorphism.
 is the number of cycles (or orbits) in g of length c.
is the number of cycles (or orbits) in g of length c. ;
; ;
; , so we have
, so we have  .
.
 be the set of colourings with weight i, then our objective is to compute
be the set of colourings with weight i, then our objective is to compute 
 , for each g in G.
, for each g in G. where
where  is the number of colours of weight w. Hence:
is the number of colours of weight w. Hence:
 , this gives:
, this gives:  . Summing up:
. Summing up:
 . Then the number of colourings with a specified weight is given by the generating function:
. Then the number of colourings with a specified weight is given by the generating function: .
. as we saw above.
as we saw above.


 ;
;

 denotes the number of colours of weight (v, w). Then Polya’s enumeration theorem can be further generalised: the number of colourings with a specified vectorial weight (v, w) is given by the coefficient of
denotes the number of colours of weight (v, w). Then Polya’s enumeration theorem can be further generalised: the number of colourings with a specified vectorial weight (v, w) is given by the coefficient of  in:
in:


![\begin{aligned} P(t, u)= &\frac 1 {24}[(1+t+u)^{12} + 6(1+t^4+u^4)^3 + 3(1+t^2+u^2)^6\\&+6(1+t+u)^2 (1+t^2+u^2)^5 + 8(1+t^3+u^3)^4].\end{aligned}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Baligned%7D+P%28t%2C+u%29%3D+%26%5Cfrac+1+%7B24%7D%5B%281%2Bt%2Bu%29%5E%7B12%7D+%2B+6%281%2Bt%5E4%2Bu%5E4%29%5E3+%2B+3%281%2Bt%5E2%2Bu%5E2%29%5E6%5C%5C%26%2B6%281%2Bt%2Bu%29%5E2+%281%2Bt%5E2%2Bu%5E2%29%5E5+%2B+8%281%2Bt%5E3%2Bu%5E3%29%5E4%5D.%5Cend%7Baligned%7D&bg=ffffff&fg=333333&s=0&c=20201002)
 where i and j are both even, compute the sum
where i and j are both even, compute the sum . ♦
. ♦ . In the
. In the 

 is given by the generating function:
is given by the generating function:
 is the i-th power symmetric function. The question is: how many colourings are of weight
is the i-th power symmetric function. The question is: how many colourings are of weight  and 0 otherwise. Now if we multiply this by an auxiliary
and 0 otherwise. Now if we multiply this by an auxiliary  and sum over all k=|X|, we get the resulting power series:
and sum over all k=|X|, we get the resulting power series: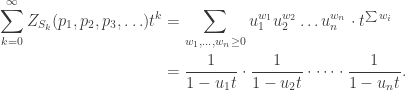


 , let
, let  . We need to compute the expansion of exp(T) until T5 and find the coefficient of t5.
. We need to compute the expansion of exp(T) until T5 and find the coefficient of t5. ;
; ;
; ;
; ;
; .
.
 , there are:
, there are:
 colourings since each vertex can take n colours independently. Letting X denote the set of these colourings, the group S3 acts on X by permuting the vertices. Our objective is now to compute
colourings since each vertex can take n colours independently. Letting X denote the set of these colourings, the group S3 acts on X by permuting the vertices. Our objective is now to compute  , the number of orbits under this group action. To that end, the following result is phenomenally useful.
, the number of orbits under this group action. To that end, the following result is phenomenally useful. ,
, is the set of all elements of X fixed by g.
is the set of all elements of X fixed by g. . We’ll compute |S| in two ways.
. We’ll compute |S| in two ways.  , the RHS.
, the RHS. , where
, where  is the isotropy group of x and
is the isotropy group of x and  , where Gx is the orbit of x. Hence,
, where Gx is the orbit of x. Hence, ,
, for each element
for each element  :
: ;
; ;
; .
. ♦
♦ , which is the set of all functions X→Y. The action of G on X extends to an action on S as follows:
, which is the set of all functions X→Y. The action of G on X extends to an action on S as follows: and
and  is a colouring, then the action is given by the composition
is a colouring, then the action is given by the composition .
. . ]
. ] . But
. But  is not hard to compute: if we express the action of g on X as a permutation, and c(g) denotes its number of cycles (or orbits), then
is not hard to compute: if we express the action of g on X as a permutation, and c(g) denotes its number of cycles (or orbits), then  since the points in each cycle must share the same colour. This gives:
since the points in each cycle must share the same colour. This gives: , where n = |Y|.
, where n = |Y|. ,
, as above. Let’s consider more examples.
as above. Let’s consider more examples. .
. which is precisely the number of ways to colour the four vertices of a square with n colours, up to rotational/reflection symmetry. ♦
which is precisely the number of ways to colour the four vertices of a square with n colours, up to rotational/reflection symmetry. ♦
 , consider the number of orbits c((g, h)). This only depends on the conjugancy classes of g and h. For example:
, consider the number of orbits c((g, h)). This only depends on the conjugancy classes of g and h. For example:
 . ♦
. ♦
 is the number of elements
is the number of elements  with exactly c orbits.
with exactly c orbits. ,
, is the number of occurrences of colour i. Elementary combinatorics then tell us the number of solutions is:
is the number of occurrences of colour i. Elementary combinatorics then tell us the number of solutions is: .
. in the polynomial:
in the polynomial: .
.![\left[\begin{matrix}k\\c\end{matrix}\right]](https://s0.wp.com/latex.php?latex=%5Cleft%5B%5Cbegin%7Bmatrix%7Dk%5C%5Cc%5Cend%7Bmatrix%7D%5Cright%5D&bg=ffffff&fg=333333&s=0&c=20201002) and is called a Stirling number of the first type.
and is called a Stirling number of the first type.
![\left[\begin{matrix}n+1\\k\end{matrix}\right] = n\left[\begin{matrix}n\\k\end{matrix}\right] + \left[\begin{matrix}n\\k-1\end{matrix}\right]](https://s0.wp.com/latex.php?latex=%5Cleft%5B%5Cbegin%7Bmatrix%7Dn%2B1%5C%5Ck%5Cend%7Bmatrix%7D%5Cright%5D+%3D+n%5Cleft%5B%5Cbegin%7Bmatrix%7Dn%5C%5Ck%5Cend%7Bmatrix%7D%5Cright%5D+%2B+%5Cleft%5B%5Cbegin%7Bmatrix%7Dn%5C%5Ck-1%5Cend%7Bmatrix%7D%5Cright%5D&bg=ffffff&fg=333333&s=0&c=20201002)
![\left[\begin{matrix}n\\n-2\end{matrix}\right] = \frac 1 4(3n-1){n\choose 3}](https://s0.wp.com/latex.php?latex=%5Cleft%5B%5Cbegin%7Bmatrix%7Dn%5C%5Cn-2%5Cend%7Bmatrix%7D%5Cright%5D+%3D+%5Cfrac+1+4%283n-1%29%7Bn%5Cchoose+3%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\left[\begin{matrix}n\\2\end{matrix}\right] = (n-1)! (1 + \frac 1 2 + \frac 1 3 + \dots + \frac 1 {n-1})](https://s0.wp.com/latex.php?latex=%5Cleft%5B%5Cbegin%7Bmatrix%7Dn%5C%5C2%5Cend%7Bmatrix%7D%5Cright%5D+%3D+%28n-1%29%21+%281+%2B+%5Cfrac+1+2+%2B+%5Cfrac+1+3+%2B+%5Cdots+%2B+%5Cfrac+1+%7Bn-1%7D%29&bg=ffffff&fg=333333&s=0&c=20201002) .
. , the following are equivalent.
, the following are equivalent. , such that 0 < |xn–x| < 1/n for each n. Then (xn)→x must be in L.
, such that 0 < |xn–x| < 1/n for each n. Then (xn)→x must be in L. . Since a is not in D it’s not a point of accumulation of D. By definition, this means that there exists ε>0 such that the set of x satisfying 0 < |x–a| < ε does not intersect D. Together with the fact that a is not in D, we see that
. Since a is not in D it’s not a point of accumulation of D. By definition, this means that there exists ε>0 such that the set of x satisfying 0 < |x–a| < ε does not intersect D. Together with the fact that a is not in D, we see that  , so Dc is open.
, so Dc is open. , an open subset of R, there must be an open ball
, an open subset of R, there must be an open ball  . On the other hand, since (xn)→L, some
. On the other hand, since (xn)→L, some  is a closed subset if D-U is an open subset of D.
is a closed subset if D-U is an open subset of D. , x > M-ε and x < M. This shows that M is a point of accumulation of D, and by the above proposition, it must lie in D, which contradicts our assumption. Thus M is a maximum of D. The case for minimum is similar.
, x > M-ε and x < M. This shows that M is a point of accumulation of D, and by the above proposition, it must lie in D, which contradicts our assumption. Thus M is a maximum of D. The case for minimum is similar.![D = [1, 2]\cup \{3\}](https://s0.wp.com/latex.php?latex=D+%3D+%5B1%2C+2%5D%5Ccup+%5C%7B3%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002) . It is closed in R since the complement is
. It is closed in R since the complement is  which is a union of open intervals. Clearly D is bounded. Being both closed and bounded, it has a minimum and a maximum (in this case, 1 and 3 respectively).
which is a union of open intervals. Clearly D is bounded. Being both closed and bounded, it has a minimum and a maximum (in this case, 1 and 3 respectively). . It is not closed because its complement is
. It is not closed because its complement is  and the point 2 has no open neighbourhood of R which is wholly contained in E. Or, look at it another way, if it were closed, then since it’s obviously bounded it would contain a maximum and a minimum, but 2 is the supremum of D which is not contained in D itself.
and the point 2 has no open neighbourhood of R which is wholly contained in E. Or, look at it another way, if it were closed, then since it’s obviously bounded it would contain a maximum and a minimum, but 2 is the supremum of D which is not contained in D itself. . The complement is
. The complement is  which is a union of open intervals and is hence open. But it’s not upper-bounded so it doesn’t have a maximum.
which is a union of open intervals and is hence open. But it’s not upper-bounded so it doesn’t have a maximum. is closed in D.
is closed in D. .
.
 is uniformly continuous (on D) if:
is uniformly continuous (on D) if:
 and
and  ,
, is Cauchy but the resulting
is Cauchy but the resulting  is not a Cauchy sequence. Hence, this tells us f(x) is not uniformly continuous, as we had verified earlier directly in example 2 above.
is not a Cauchy sequence. Hence, this tells us f(x) is not uniformly continuous, as we had verified earlier directly in example 2 above. is a sequence of uniformly continuous functions on D, which converges uniformly to
is a sequence of uniformly continuous functions on D, which converges uniformly to  . Fix n. Since
. Fix n. Since  is uniformly continuous, there exists δ>0 such that whenever
is uniformly continuous, there exists δ>0 such that whenever  satisfies |x–y|<δ, we also have
satisfies |x–y|<δ, we also have  . Hence:
. Hence: .
. , where n = 1, 2, 3, … ,
, where n = 1, 2, 3, … , converges to some real value. We’ll denote this value by f(x), thus defining a function f : D → R. We then say that the sequence of functions fn(x) converges to f(x) pointwise.
converges to some real value. We’ll denote this value by f(x), thus defining a function f : D → R. We then say that the sequence of functions fn(x) converges to f(x) pointwise.![f_n : [0,1]\to\mathbf{R}, \quad f_n(x) = x^n.](https://s0.wp.com/latex.php?latex=f_n+%3A+%5B0%2C1%5D%5Cto%5Cmathbf%7BR%7D%2C+%5Cquad+f_n%28x%29+%3D+x%5En.&bg=ffffff&fg=333333&s=0&c=20201002)


 and
and  ,
, ♦
♦
 which is either a non-negative real number or +∞. It’s not hard to show that
which is either a non-negative real number or +∞. It’s not hard to show that  ,
,  and
and  .
. uniformly if:
uniformly if:
 on D=[0,1]. Since the functions converge to a discontinuous function, the above theorem tells us the convergence is not uniform, but let’s verify this directly. Indeed, the function
on D=[0,1]. Since the functions converge to a discontinuous function, the above theorem tells us the convergence is not uniform, but let’s verify this directly. Indeed, the function  takes xn on [0,1) and 0 at x=1. Thus,
takes xn on [0,1) and 0 at x=1. Thus,  for all n, which shows that the convergence is not uniform.
for all n, which shows that the convergence is not uniform. for each n, so
for each n, so  . As expected, since each fn(x) is continuous, so is the resulting converged function f(x).
. As expected, since each fn(x) is continuous, so is the resulting converged function f(x). for each n. In other words, one can have pointwise convergence of a sequence of continuous functions to a continuous function, even if the convergence is not uniform.
for each n. In other words, one can have pointwise convergence of a sequence of continuous functions to a continuous function, even if the convergence is not uniform. on (1, ∞). We know
on (1, ∞). We know  , so that
, so that  pointwise. Suppose we wish to show that ζ(x) is continuous at x=a>1.
pointwise. Suppose we wish to show that ζ(x) is continuous at x=a>1.
 which is a convergent series since b>1.
which is a convergent series since b>1. , which shows that gn converges uniformly to g.
, which shows that gn converges uniformly to g. and
and  are sequences of functions which converge uniformly to
are sequences of functions which converge uniformly to  respectively. What about the sum
respectively. What about the sum  , product
, product  and reciprocal
and reciprocal  ?
? uniformly. To see why, write:
uniformly. To see why, write:
 ,
,  and
and  for large n. Thus, we also have
for large n. Thus, we also have  for large n.
for large n.
 for large n. It then follows that we can write
for large n. It then follows that we can write  for some positive bound B and
for some positive bound B and  . Hence, it also follows that
. Hence, it also follows that  converges uniformly.
converges uniformly.
 and
and  uniformly. However,
uniformly. However,  .
. uniformly, assuming that g(x) and gn(x) are never 0. Taking the difference gives:
uniformly, assuming that g(x) and gn(x) are never 0. Taking the difference gives:
 for all n. This means
for all n. This means  for all n, and
for all n, and  , i.e.
, i.e.  for all n>N and
for all n>N and  when
when  .
. for all n and it follows that
for all n and it follows that  is zero? Consider the example of
is zero? Consider the example of ![g_n: (0, 1]\to\mathbf{R}, g_n(x)=(1+\frac 1 n)x](https://s0.wp.com/latex.php?latex=g_n%3A+%280%2C+1%5D%5Cto%5Cmathbf%7BR%7D%2C+g_n%28x%29%3D%281%2B%5Cfrac+1+n%29x&bg=ffffff&fg=333333&s=0&c=20201002)
 . Then
. Then  converges to g(x)=x uniformly since
converges to g(x)=x uniformly since  . On the other hand,
. On the other hand,
 and
and  uniformly, where each
uniformly, where each  . Then:
. Then: uniformly as well;
uniformly as well; , then
, then  for all n, then
for all n, then 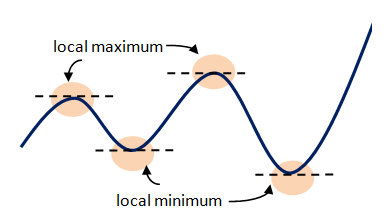
 . Now when x>a, we have f(x)≤f(a), so
. Now when x>a, we have f(x)≤f(a), so  and so the limit ≤ 0. On the other hand, when x<a, the inequality f(x)≤f(a) also gives
and so the limit ≤ 0. On the other hand, when x<a, the inequality f(x)≤f(a) also gives  so the limit ≥ 0. These two inequalities force the limit to be 0. ♦
so the limit ≥ 0. These two inequalities force the limit to be 0. ♦ is closed if its complement Rn-C is an open subset of Rn. We’ll have more to say about closed subsets in a later article.
is closed if its complement Rn-C is an open subset of Rn. We’ll have more to say about closed subsets in a later article.
 . Now to form a triangle, we need L/2 ≤ a ≤ L which gives a function f : [L/2, L] → R. Since [L/2, L] is closed and bounded, the image of f attains a maximum and a minimum.
. Now to form a triangle, we need L/2 ≤ a ≤ L which gives a function f : [L/2, L] → R. Since [L/2, L] is closed and bounded, the image of f attains a maximum and a minimum.
 gives us x=L or (2/3)L. Clearly, the latter is the correct answer. So the optimum dimensions are (2L/3, 2L/3, 2L/3), an equilateral triangle.
gives us x=L or (2/3)L. Clearly, the latter is the correct answer. So the optimum dimensions are (2L/3, 2L/3, 2L/3), an equilateral triangle. ;
; ;
; .
. . Since b varies, we differentiate this with respect to b and set it to zero, which gives b = L-(a/2), i.e. the sides are a, L-(a/2) and L-(a/2) so we get an isosceles triangle, which reduces this to the previous problem.
. Since b varies, we differentiate this with respect to b and set it to zero, which gives b = L-(a/2), i.e. the sides are a, L-(a/2) and L-(a/2) so we get an isosceles triangle, which reduces this to the previous problem.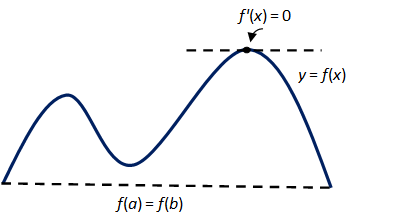
 .
.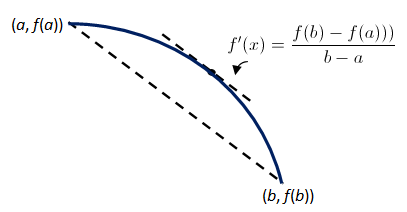
 , for some constant c such that g(a) = g(b). Clearly,
, for some constant c such that g(a) = g(b). Clearly,  . Rolle’s theorem says there exists x in (a, b) such that g’(x) = 0, whence we have
. Rolle’s theorem says there exists x in (a, b) such that g’(x) = 0, whence we have  . ♦
. ♦ , which is a contradiction. ♦
, which is a contradiction. ♦ . Let’s check the behaviour of f(x) as x increases. The above results suggest that the derivative is helpful: indeed, writing
. Let’s check the behaviour of f(x) as x increases. The above results suggest that the derivative is helpful: indeed, writing  gives:
gives:
 which contradicts the second point. Likewise, if x < e satisfies f(x) ≥ f(e), then this contradicts the first point.
which contradicts the second point. Likewise, if x < e satisfies f(x) ≥ f(e), then this contradicts the first point. .
. ,
, for all x in (a, b), x ≠ c,
for all x in (a, b), x ≠ c, ,
, .
.
 to converge. E.g. take our earlier example of
to converge. E.g. take our earlier example of  and g(x) = x, defined on x≠0. Then the first two conditions are satisfied, but now
and g(x) = x, defined on x≠0. Then the first two conditions are satisfied, but now
 by squeeze theorem. In summary, even if f’(x)/g’(x) fails to converge as x→c, it’s still possible for f(x)/g(x) to converge.
by squeeze theorem. In summary, even if f’(x)/g’(x) fails to converge as x→c, it’s still possible for f(x)/g(x) to converge. if
if  . [ Note that the converse isn’t true, as the above warning tells us. ]
. [ Note that the converse isn’t true, as the above warning tells us. ]



 ,
,  . The resulting function is then written as
. The resulting function is then written as  .
.

 when x≠a. Hence, as x→a, the expression tends to
when x≠a. Hence, as x→a, the expression tends to  . Conclusion: the derivative exists at every point a on the real line and
. Conclusion: the derivative exists at every point a on the real line and  .
. .
. . Conclusion: the derivative exists for every non-zero a.
. Conclusion: the derivative exists for every non-zero a. , so:
, so:


 ,
,
 ,
, .
. ;
; ;
; ;
; .
.
 for n≥0. By applying the division rule, we see that in fact this equation holds for all integers n.
for n≥0. By applying the division rule, we see that in fact this equation holds for all integers n. . We wish to compute
. We wish to compute  and
and  . Since f(x) = v(u(x)), the chain rule gives us
. Since f(x) = v(u(x)), the chain rule gives us

 . Substituting x=1 then gives us the combinatorial equality:
. Substituting x=1 then gives us the combinatorial equality:

 on the LHS and
on the LHS and  on the RHS by using the chain rule with u(x) = 1-x. But there’s no guarantee that the addition rule holds for infinitely many terms, although in this case it does work. The underlying theory will be covered in greater detail in a later article.
on the RHS by using the chain rule with u(x) = 1-x. But there’s no guarantee that the addition rule holds for infinitely many terms, although in this case it does work. The underlying theory will be covered in greater detail in a later article.

 When a≠0, the derivative
When a≠0, the derivative  , which does not converge as a→0. When a=0, the derivative is
, which does not converge as a→0. When a=0, the derivative is  by squeezing the function between |x| and -|x|.
by squeezing the function between |x| and -|x|.
 At the points x=a≠0, it’s easy to see the n-th derivative is of the form
At the points x=a≠0, it’s easy to see the n-th derivative is of the form  for some polynomial p(x) and positive integer m. To check its behaviour as x→0, let y=1/x; then
for some polynomial p(x) and positive integer m. To check its behaviour as x→0, let y=1/x; then  which approaches zero since exponential increases much faster than any polynomial function. With this, one proves via induction that the n-th derivative at 0 is always 0, so the Taylor series is 0.
which approaches zero since exponential increases much faster than any polynomial function. With this, one proves via induction that the n-th derivative at 0 is always 0, so the Taylor series is 0. where
where  . To that end, we need the Euclidean distance function on Rn. If x = (x1, x2, …, xn) is in Rn, we define:
. To that end, we need the Euclidean distance function on Rn. If x = (x1, x2, …, xn) is in Rn, we define:
 is said to be continuous at a if:
is said to be continuous at a if: is said to be a point of accumulation, if for any ε>0, there exists
is said to be a point of accumulation, if for any ε>0, there exists  such that
such that .
.
 is continuous.
is continuous. and
and  is continuous at a and
is continuous at a and  is continuous at b=f(a), then
is continuous at b=f(a), then  is continuous at a.
is continuous at a. which projects to i-th component is continuous at every point.
which projects to i-th component is continuous at every point. is continuous for each i.
is continuous for each i. are continuous, as is the reciprocal
are continuous, as is the reciprocal  .
. .
. for each i=1,2,…,m. Hence, when x is close to a in D, we have |f(x)-f(a)| < ε as well.
for each i=1,2,…,m. Hence, when x is close to a in D, we have |f(x)-f(a)| < ε as well. . When |x–a|<|a|/2, we have |x|>|a|/2. Hence, for any ε>0, whenever |x–a|<min(|a|/2, ε|a|2/2) we get
. When |x–a|<|a|/2, we have |x|>|a|/2. Hence, for any ε>0, whenever |x–a|<min(|a|/2, ε|a|2/2) we get  .
. and
and  are continuous at a and a’ respectively, where
are continuous at a and a’ respectively, where  . Then
. Then  given by
given by  is continuous at (a, a’).
is continuous at (a, a’). is continuous if it’s continuous at every point in the domain. From definition, it’s clear that continuity at a specific point is determined by what happens close to that point. To that end, let’s define open sets.
is continuous if it’s continuous at every point in the domain. From definition, it’s clear that continuity at a specific point is determined by what happens close to that point. To that end, let’s define open sets. is the set of points:
is the set of points:
 . ]
. ] is said to be an open subset of D if for each
is said to be an open subset of D if for each  for some ε>0.
for some ε>0. . Indeed, any y in N(x, δ) satisfies
. Indeed, any y in N(x, δ) satisfies 
![D = [0, 1]\cup\{2\}](https://s0.wp.com/latex.php?latex=D+%3D+%5B0%2C+1%5D%5Ccup%5C%7B2%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002) . The subset U = [0, 1] is now an open subset of D. This may confuse the reader at first glance, but note that even if we pick the endpoint 1 (in U), we can pick the open ball N(1, 1/2) in D. By definition, this is the set
. The subset U = [0, 1] is now an open subset of D. This may confuse the reader at first glance, but note that even if we pick the endpoint 1 (in U), we can pick the open ball N(1, 1/2) in D. By definition, this is the set  , so it’s (1/2, 1] which is wholly contained in U. Likewise, the singleton subset V = {2} is also a subset of D, since the open ball N(2, 1/2) = {2} is wholly contained in U.
, so it’s (1/2, 1] which is wholly contained in U. Likewise, the singleton subset V = {2} is also a subset of D, since the open ball N(2, 1/2) = {2} is wholly contained in U.

 while in the other two,
while in the other two,  . The dotted boundary lines indicate that the boundaries are not included in U.
. The dotted boundary lines indicate that the boundaries are not included in U. ,
,  is an open subset of D.
is an open subset of D. . Since f(a) is in U which is open, there exists an ε>0 such that N(f(a), ε) is a subset of U. And since f is continuous at a, there exists a δ>0 such that whenever |x–
. Since f(a) is in U which is open, there exists an ε>0 such that N(f(a), ε) is a subset of U. And since f is continuous at a, there exists a δ>0 such that whenever |x–
 is open for any open subset
is open for any open subset  is open, so is
is open, so is 
 .
.