
Motivation
The separation axioms attempt to answer the following.
Question. Given a topological space X, how far is it from being metrisable?
We had a hint earlier: all metric spaces are Hausdorff, i.e. distinct points can be separated by two disjoint open subsets. But that’s only part of the story. Metric spaces, in fact, satisfy more.
Theorem 1. If (X, d) is a metric space and
are disjoint non-empty closed subsets, then we can find open subsets U, V of X such that:

To prove this, let’s have a little lemma. [ Note: this will be important later; it pays to take note of it now. ]
Lemma. Let C be a closed subset of a metric space (X, d) and
Then the distance from x to C:
is positive.

Proof of Lemma.
Since 



Now we’re ready to prove the theorem.
Proof of Theorem.
For each 



We claim U and V are disjoint. If not, z lies in both 

But by definition d(x, y) ≥ d(x, D) and d(y, x) ≥ d(y, C), which is a contradiction. ♦

Separation Axioms
Let X be any topological space now. The following labels are given to X if it satisfies the corresponding condition:
Definition.
- T1 : for any distinct points
we can find an open subset U of X containing x but not y.
- T2 : for any distinct points
- T3 : T1 and regular (X is regular if, for any point
and closed subset C of X not containing x, we can find open subsets U, V of X, such that
).
- T4 : T1 and normal (X is normal if, for any disjoint closed subsets
we can find open subsets U, V of X such that
).

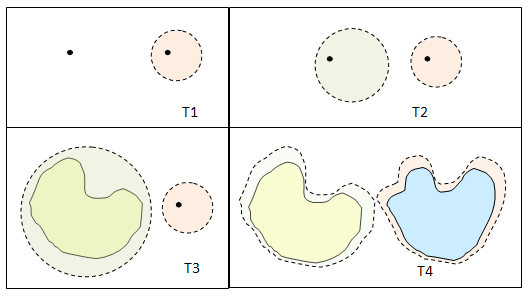
Note that T2 is just the Hausdorff condition. Theorem 1 thus says: a metric space satisfies all the separation axioms.
Let’s examine these axioms one at a time.
Proposition 2 (T1). The space X is T1 if and only if all singleton sets {x} are closed.
Proof.
(→) If X is T1, let C = {x}. For any y outside x, the T1 axiom tells us there’s an open subset V containing y but not x, i.e. 
(←) If x, y are distinct points in X, then X-{y} is open and it contains x but not y. ♦
Note.
This proposition explains why, for T3 and T4, we have to specify the condition of T1 in addition to regularity / normality. This ensures that each {x} is closed and so T4 → T3 → T2 → T1, in increasing order of generality.
Furthermore, none of the implications is reversible. E.g. the topology (X, T) with X = {1, 2} and T = {{}, {1}, {1, 2}} satisfies T1 but not T2. For other examples, the reader may search the “spacebook” which is based on the famous book “Counterexamples in Topology“.
Proposition 3 (T3). A locally compact Hausdorff space is T3.
Proof.
Note that a space X is regular if and only if for any open subset U of X and 

Now suppose X is locally compact and Hausdorff. Let U be an open subset of X containing x. By theorem 1 here, x is contained in an open subset V of X such that cl(V) is compact and contained in U. ♦
The converse is not true: there’re T3 spaces which are not locally compact. Also, there’re locally compact spaces which are not T4.
Proposition 4 (T4). A compact Hausdorff space is T4.
Proof
Suppose X is compact; then it’s locally compact so it’s T3. Let C, D be disjoint closed subsets of X. For each 


Now the collection of {Vy} covers D. Since D is a closed subset of compact X, it’s compact as well, so there’s a finite subcover 

Since Uy and Vy are disjoint for each y, so are U and V. We get: 

Clearly, not every T4 space is compact since there’re metric spaces which are not compact.
 Combined Properties
Combined Properties
The separation axioms satisfy the following properties. We skip the case of T2 since it had been done earlier.
Theorem 3. If Y is a subspace of X, and X satisfies T1 (resp. T2, T3), then so does Y.
Proof.
(T1). If 
(T3). Let D be a closed subset of Y and 


we see that C doesn’t contain x. Since X is regular, we can enclose x, C in disjoint open subsets U, V of X. Then 

Exercise.
Prove that if Y is a closed subset of X and X satisfies T4, then so does Y. [ A subspace of a T4 space is not necessarily T4, but counter-examples are hard to find. ]
Theorem 4. If
is a collection of topological spaces which satisfy T1 (resp. T2, T3), then so is their product

Proof.
(T1). Let 


(T3) Let 



where equality holds for 




Now 

Note
Unfortunately, a product of T4 spaces is not necessarily T4.
Urysohn’s Lemma
Urysohn’s Lemma. Suppose X is normal. Then for any disjoint non-empty closed subsets C, D of X, there is a continuous map
such that f(C)={0} and f(D)={1}.
[ In particular, this holds for T4 spaces. ]
Note.
If X is connected, then f must be surjective since f(X) is a connected subset of [0, 1] containing 0 and 1. So we can label points of X continuously from 0 to 1 without gaps!
Proof.
[ All closed/open subsets are assumed with reference to X. ]
Note that normality is equivalent to: for any closed C and open U containing it, there’s an open V and closed D such that

Armed with this, first define 




Now proceed inductively, suppose we have a sequence of sets (each “C” is closed and “V” is open):

For each 0 ≤ r/2k < 1, given the inclusion 



This creates a corresponding chain for r/2k+1. In this way, we create a series of 


Now define the function:
![f:X \to [0,1], \quad f(x) = \inf\{t : x\in V_t \text{ or } t=1\}.](https://s0.wp.com/latex.php?latex=f%3AX+%5Cto+%5B0%2C1%5D%2C+%5Cquad+f%28x%29+%3D+%5Cinf%5C%7Bt+%3A+x%5Cin+V_t+%5Ctext%7B+or+%7D+t%3D1%5C%7D.&bg=ffffff&fg=333333&s=0&c=20201002)
Clearly f(C) = {0} and f(D) = {1}. It remains to show f is continuous.
Let 

Let ![C=f^{-1}([0, b])](https://s0.wp.com/latex.php?latex=C%3Df%5E%7B-1%7D%28%5B0%2C+b%5D%29&bg=ffffff&fg=333333&s=0&c=20201002)






![f^{-1}((b, 1])](https://s0.wp.com/latex.php?latex=f%5E%7B-1%7D%28%28b%2C+1%5D%29&bg=ffffff&fg=333333&s=0&c=20201002)
Since [0, b) and (b, 1] form a subbasis for [0, 1], we’re done. ♦
Urysohn’s Metrisation Theorem
The following result shows a sufficient condition for metrisability.
Definition. A topological space X is second-countable if it has a basis B with countably many elements.
For example, even though set-theoretically R is uncountable, its topology is second-countable since it has a basis comprising of open intervals (a, b) for rational a<b.
Urysohn’s Metrisation Theorem. If X is a T3 space which is second-countable, then it’s metrisable.
The proof follows a couple of steps.
Step 1 : T3 + second-countable implies T4.
Let 



Similarly, we’ll cover D via 



Each 



Step 2: Find countably many continuous fn : X → [0, 1] such that for any x in X and closed subset C not containing x, there’s an fn such that fn(x)=0, fn(C)={1}.
Pick a countable basis. For any U, V in this basis satisfying 
![f: X\to [0, 1]](https://s0.wp.com/latex.php?latex=f%3A+X%5Cto+%5B0%2C+1%5D&bg=ffffff&fg=333333&s=0&c=20201002)
Indeed, for any x in X and closed subset C not containing x, we can pick an open subset V such that 

Step 3: Embed X into countably many copies of R.
Let ![f_1, f_2, \ldots :X\to [0,1]](https://s0.wp.com/latex.php?latex=f_1%2C+f_2%2C+%5Cldots+%3AX%5Cto+%5B0%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002)
![f:X \to [0,1]^\mathbf{N}](https://s0.wp.com/latex.php?latex=f%3AX+%5Cto+%5B0%2C1%5D%5E%5Cmathbf%7BN%7D&bg=ffffff&fg=333333&s=0&c=20201002)


First if x≠y, then there’s an fn: X → [0, 1] such that fn(x)=0 and fn(y)=1. So f(x)≠f(y) and f is injective.
Next we need to show: if 

![V\subseteq [0,1]^\mathbf{N}.](https://s0.wp.com/latex.php?latex=V%5Csubseteq+%5B0%2C1%5D%5E%5Cmathbf%7BN%7D.&bg=ffffff&fg=333333&s=0&c=20201002)

and the union of all such 
![V\subseteq [0, 1]^\mathbf{N}](https://s0.wp.com/latex.php?latex=V%5Csubseteq+%5B0%2C+1%5D%5E%5Cmathbf%7BN%7D&bg=ffffff&fg=333333&s=0&c=20201002)

Thus X has the subspace topology from [0, 1]N. We already saw that the product of countably many metrisable spaces is metrisable, so we’re done. ♦

 is open in U if and only if it’s open in X. In such instances, we’ll sometimes abuse our language and say “V is open” without specifying the ambient space.
is open in U if and only if it’s open in X. In such instances, we’ll sometimes abuse our language and say “V is open” without specifying the ambient space. Now we can write U as a union of connected open subsets. One of these (say V) must contain x. ♦
Now we can write U as a union of connected open subsets. One of these (say V) must contain x. ♦ , where Y is a connected component of X. By definition, x is contained in some open connected subset U of X. Since Y is a maximal connected set containing x, we have
, where Y is a connected component of X. By definition, x is contained in some open connected subset U of X. Since Y is a maximal connected set containing x, we have  This shows that Y is open in X. ♦
This shows that Y is open in X. ♦ where:
where:![Y = \{0\} \times[0,1]](https://s0.wp.com/latex.php?latex=Y+%3D+%5C%7B0%5C%7D+%5Ctimes%5B0%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002) and
and 
 , the ε-neighbourhood of the origin contains more than one (in fact infinitely many!) connected components:
, the ε-neighbourhood of the origin contains more than one (in fact infinitely many!) connected components:
 is a union of open subsets and each Ui is locally connected, then so is X.
is a union of open subsets and each Ui is locally connected, then so is X. where U’ is open in U. Then U’ is open in X so there exists a connected open subset V of X such that
where U’ is open in U. Then U’ is open in X so there exists a connected open subset V of X such that  This V is also open in U.
This V is also open in U. . Then
. Then  for some i. By local connectedness of Ui, and
for some i. By local connectedness of Ui, and  there exists a connected open subset V of Ui ∩ U such that
there exists a connected open subset V of Ui ∩ U such that  Thus,
Thus, 
 Then Y is closed in X, but there’s no connected open subset of 0 in Y.
Then Y is closed in X, but there’s no connected open subset of 0 in Y. is a basis of X × Y comprising of open connected subsets. ♦
is a basis of X × Y comprising of open connected subsets. ♦ where
where  for some n. Then projecting to the n-th component gives a surjective map
for some n. Then projecting to the n-th component gives a surjective map  which violates the theorem that the
which violates the theorem that the  for some ε>0, which is open in X.
for some ε>0, which is open in X. and consider an infinite sequence of wheel spokes:
and consider an infinite sequence of wheel spokes: ![X_0 = [0, 1] \times \{0\}](https://s0.wp.com/latex.php?latex=X_0+%3D+%5B0%2C+1%5D+%5Ctimes+%5C%7B0%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002) and:
and: for n = 1, 2, … .
for n = 1, 2, … . :
:
 On the other hand, X is clearly path-connected.
On the other hand, X is clearly path-connected. is a union of open subsets and each Ui is locally C, then so is X.
is a union of open subsets and each Ui is locally C, then so is X.![f:[0, 1] \to X.](https://s0.wp.com/latex.php?latex=f%3A%5B0%2C+1%5D+%5Cto+X.&bg=ffffff&fg=333333&s=0&c=20201002) The path is said to connect x and y in X if f(0)=x and f(1)=y. X is said to be path-connected if any two points can be connected by a path.
The path is said to connect x and y in X if f(0)=x and f(1)=y. X is said to be path-connected if any two points can be connected by a path.
 Pick
Pick  such that f(x)=0 and f(y)=1. There’s a path
such that f(x)=0 and f(y)=1. There’s a path ![g:[0, 1] \to X](https://s0.wp.com/latex.php?latex=g%3A%5B0%2C+1%5D+%5Cto+X&bg=ffffff&fg=333333&s=0&c=20201002) such that g(0)=x and g(1)=y. Now the composition
such that g(0)=x and g(1)=y. Now the composition ![f\circ g:[0, 1] \to\{0,1\}](https://s0.wp.com/latex.php?latex=f%5Ccirc+g%3A%5B0%2C+1%5D+%5Cto%5C%7B0%2C1%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002) is continuous and surjective, which contradicts the fact that [0, 1] is connected. ♦
is continuous and surjective, which contradicts the fact that [0, 1] is connected. ♦ where
where ![Y = \{0\}\times [0, 1],](https://s0.wp.com/latex.php?latex=Y+%3D+%5C%7B0%5C%7D%5Ctimes+%5B0%2C+1%5D%2C&bg=ffffff&fg=333333&s=0&c=20201002)

![f:[0, 1] \to X](https://s0.wp.com/latex.php?latex=f%3A%5B0%2C+1%5D+%5Cto+X&bg=ffffff&fg=333333&s=0&c=20201002) is continuous and f(0) = (0, 0), f(1) = (1, sin(1)).
is continuous and f(0) = (0, 0), f(1) = (1, sin(1)).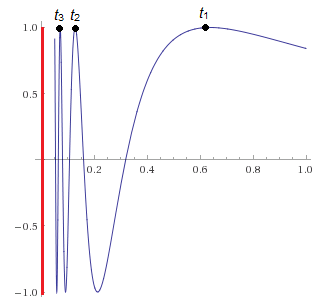
 be projection maps to the x– and y-coordinates respectively. Then
be projection maps to the x– and y-coordinates respectively. Then ![\pi_x \circ f:[0, 1]\to \mathbf{R}](https://s0.wp.com/latex.php?latex=%5Cpi_x+%5Ccirc+f%3A%5B0%2C+1%5D%5Cto+%5Cmathbf%7BR%7D&bg=ffffff&fg=333333&s=0&c=20201002) contains 0 and 1, so its image is the whole [0, 1] by the
contains 0 and 1, so its image is the whole [0, 1] by the  Pick points
Pick points ![t_0, t_1, t_2, \ldots \in [0, 1]](https://s0.wp.com/latex.php?latex=t_0%2C+t_1%2C+t_2%2C+%5Cldots+%5Cin+%5B0%2C+1%5D&bg=ffffff&fg=333333&s=0&c=20201002) such that
such that 
![t, u\in [0, 1]](https://s0.wp.com/latex.php?latex=t%2C+u%5Cin+%5B0%2C+1%5D&bg=ffffff&fg=333333&s=0&c=20201002) satisfy
satisfy  we have
we have  Since [0, 1] is compact, we’ll pick m<n such that
Since [0, 1] is compact, we’ll pick m<n such that  By intermediate value theorem, there’s a point u between tm and tn such that
By intermediate value theorem, there’s a point u between tm and tn such that  Then
Then  but
but  which is a contradiction.
which is a contradiction. is a continuous map of topological spaces and X is path-connected, then so is f(X).
is a continuous map of topological spaces and X is path-connected, then so is f(X). we can pick
we can pick  such that
such that  Pick a path
Pick a path  and
and  Then the composition gives a path
Then the composition gives a path ![g\circ f:[0, 1] \to Y](https://s0.wp.com/latex.php?latex=g%5Ccirc+f%3A%5B0%2C+1%5D+%5Cto+Y&bg=ffffff&fg=333333&s=0&c=20201002) which connects
which connects  to
to  ♦
♦ is a collection of path-connected subspaces of X and
is a collection of path-connected subspaces of X and  then so is
then so is 
 If
If  then
then  and
and  for some indices i and j. Since Yi and Yj are path-connected and contain x, there’s a path in Yi connecting x to y and a path in Yj connecting x to z. Hence, concatenating gives a path connecting y to z. ♦
for some indices i and j. Since Yi and Yj are path-connected and contain x, there’s a path in Yi connecting x to y and a path in Yj connecting x to z. Hence, concatenating gives a path connecting y to z. ♦ is also path-connected.
is also path-connected. Since each
Since each  is path connected, pick a path
is path connected, pick a path ![f_i :[0,1]\to X_i](https://s0.wp.com/latex.php?latex=f_i+%3A%5B0%2C1%5D%5Cto+X_i&bg=ffffff&fg=333333&s=0&c=20201002) such that
such that  Now let
Now let ![f:[0, 1]\to X](https://s0.wp.com/latex.php?latex=f%3A%5B0%2C+1%5D%5Cto+X&bg=ffffff&fg=333333&s=0&c=20201002) be the path
be the path 
![\pi_i \circ f : [0,1]\to X_i](https://s0.wp.com/latex.php?latex=%5Cpi_i+%5Ccirc+f+%3A+%5B0%2C1%5D%5Cto+X_i&bg=ffffff&fg=333333&s=0&c=20201002) is continuous for each i, where
is continuous for each i, where  is the projection map. But
is the projection map. But  so we’re done. ♦
so we’re done. ♦ Since the example
Since the example  in the
in the ![X = [0, 1) \cup (2, 3]](https://s0.wp.com/latex.php?latex=X+%3D+%5B0%2C+1%29+%5Ccup+%282%2C+3%5D&bg=ffffff&fg=333333&s=0&c=20201002) is a disjoint union of
is a disjoint union of  and
and ![(2, 3],](https://s0.wp.com/latex.php?latex=%282%2C+3%5D%2C&bg=ffffff&fg=333333&s=0&c=20201002) each of which is a path-connected component.
each of which is a path-connected component. Otherwise, it’s disconnected.
Otherwise, it’s disconnected. where {0, 1} has the discrete topology, is constant.
where {0, 1} has the discrete topology, is constant.

 and
and  are non-empty disjoint open subsets such that
are non-empty disjoint open subsets such that  Conversely, if
Conversely, if  where U, V are non-empty, disjoint and open in X, then we can set
where U, V are non-empty, disjoint and open in X, then we can set ♦
♦ is connected.
is connected. so Y is dense in Z. Suppose
so Y is dense in Z. Suppose  is continuous. Then
is continuous. Then  is constant (say, 0) since Y is connected. Since
is constant (say, 0) since Y is connected. Since  is closed and contains Y, it must be the whole of Z. ♦
is closed and contains Y, it must be the whole of Z. ♦ is a surjective continuous map. Then
is a surjective continuous map. Then  is also continuous and surjective, so X is disconnected (contradiction). Hence, g does not exist. ♦
is also continuous and surjective, so X is disconnected (contradiction). Hence, g does not exist. ♦ then
then  is connected.
is connected. . Let
. Let  be a continuous map. Then each
be a continuous map. Then each  is constant for each i, and it must be equal to f(x). So f is constant. ♦
is constant for each i, and it must be equal to f(x). So f is constant. ♦![(a, b), (a, b], [a, b), [a, b]](https://s0.wp.com/latex.php?latex=%28a%2C+b%29%2C+%28a%2C+b%5D%2C+%5Ba%2C+b%29%2C+%5Ba%2C+b%5D&bg=ffffff&fg=333333&s=0&c=20201002) ;
;![(-\infty, b), (-\infty, b], (a, \infty), [a, \infty), \mathbf{R}](https://s0.wp.com/latex.php?latex=%28-%5Cinfty%2C+b%29%2C+%28-%5Cinfty%2C+b%5D%2C+%28a%2C+%5Cinfty%29%2C+%5Ba%2C+%5Cinfty%29%2C+%5Cmathbf%7BR%7D&bg=ffffff&fg=333333&s=0&c=20201002) ;
;![(a, b], [a, b), [a, b],](https://s0.wp.com/latex.php?latex=%28a%2C+b%5D%2C+%5Ba%2C+b%29%2C+%5Ba%2C+b%5D%2C&bg=ffffff&fg=333333&s=0&c=20201002) these are all connected by proposition 2. Finally, for the unbounded intervals, apply proposition 4. E.g.
these are all connected by proposition 2. Finally, for the unbounded intervals, apply proposition 4. E.g. 
 is connected and
is connected and  with a<b, then
with a<b, then ![[a,b]\subseteq X.](https://s0.wp.com/latex.php?latex=%5Ba%2Cb%5D%5Csubseteq+X.&bg=ffffff&fg=333333&s=0&c=20201002) [ Indeed, if a < r < b and
[ Indeed, if a < r < b and  then
then  and the two open subsets are non-empty since they contain a and b respectively. ]
and the two open subsets are non-empty since they contain a and b respectively. ]![[y,z]\subseteq X](https://s0.wp.com/latex.php?latex=%5By%2Cz%5D%5Csubseteq+X&bg=ffffff&fg=333333&s=0&c=20201002) and
and  Thus,
Thus,  The fact that a isn’t in X shows that equality holds. ] ♦
The fact that a isn’t in X shows that equality holds. ] ♦![f:[a,b]\to \mathbf{R}](https://s0.wp.com/latex.php?latex=f%3A%5Ba%2Cb%5D%5Cto+%5Cmathbf%7BR%7D&bg=ffffff&fg=333333&s=0&c=20201002) is continuous, then the image of f is also a closed interval [c, d]. In particular, if s lies between f(a) and f(b), then there exists an r in [a, b], f(r) = s.
is continuous, then the image of f is also a closed interval [c, d]. In particular, if s lies between f(a) and f(b), then there exists an r in [a, b], f(r) = s. and
and  with a<b, then we can pick an irrational r, a<r<b so that
with a<b, then we can pick an irrational r, a<r<b so that  is a disjoint union of two non-empty open subsets. So Y is disconnected.
is a disjoint union of two non-empty open subsets. So Y is disconnected. But Y is a maximal connected subset, so
But Y is a maximal connected subset, so  ♦
♦ is connected if and only if each
is connected if and only if each  be surjective and continuous. Let
be surjective and continuous. Let  Since
Since  where
where  for all but finitely many i‘s :
for all but finitely many i‘s :  Thus:
Thus: (#)
(#) satisfy:
satisfy:  for all i except i=j, then they belong to the same connected component.
for all i except i=j, then they belong to the same connected component. is homeomorphic to Xj so it is a connected subset containing
is homeomorphic to Xj so it is a connected subset containing 
 one at a time and see that the whole
one at a time and see that the whole  is contained in
is contained in  i.e. X is connected. ♦
i.e. X is connected. ♦ the space of all real sequences and U the subset of all sequences converging to 0. Any
the space of all real sequences and U the subset of all sequences converging to 0. Any  is also contained in
is also contained in  which is open in the box topology and contained in U. Thus U is open. The same holds for any
which is open in the box topology and contained in U. Thus U is open. The same holds for any  so X–U is also open. [ Note that the sublemma implies altering a single term in a sequence has no effect on whether it converges to 0. ]
so X–U is also open. [ Note that the sublemma implies altering a single term in a sequence has no effect on whether it converges to 0. ]![X = [0, 1)\cup (2, 3]](https://s0.wp.com/latex.php?latex=X+%3D+%5B0%2C+1%29%5Ccup+%282%2C+3%5D&bg=ffffff&fg=333333&s=0&c=20201002) is disconnected since
is disconnected since  and
and ![(2, 3] = (2, 4)\cap X](https://s0.wp.com/latex.php?latex=%282%2C+3%5D+%3D+%282%2C+4%29%5Ccap+X&bg=ffffff&fg=333333&s=0&c=20201002) are open subsets of X. These give the connected components of X.
are open subsets of X. These give the connected components of X.
 contains a point of Z. Thus
contains a point of Z. Thus  Since Z is connected, proposition 2 tells us X is connected too.
Since Z is connected, proposition 2 tells us X is connected too.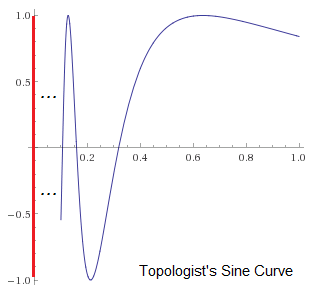
 is a dense subspace of Y.
is a dense subspace of Y.
 This is called a one-point compactification of X.
This is called a one-point compactification of X. in the plane.
in the plane. is given by the union of two circles which are tangent to each other.
is given by the union of two circles which are tangent to each other. in 3-space.
in 3-space. then V is an open subset of Y contained in X, so V is open in X.
then V is an open subset of Y contained in X, so V is open in X. , then
, then  is of the second type (it’s compact since ∩Ci is closed is closed in each Ci).
is of the second type (it’s compact since ∩Ci is closed is closed in each Ci). and C ∩ (X–U) is closed in X and compact since it’s a closed subset of C.
and C ∩ (X–U) is closed in X and compact since it’s a closed subset of C. be an open cover. Then there’s at least one Cj, and
be an open cover. Then there’s at least one Cj, and
 by
by  and
and  Clearly f is continuous outside ∞. For continuity at ∞, an open subset containing (1, 0) must contain the set V of
Clearly f is continuous outside ∞. For continuity at ∞, an open subset containing (1, 0) must contain the set V of 
 for some ε>0. Then
for some ε>0. Then  is the set
is the set ![Y - [\epsilon, 1-\epsilon]](https://s0.wp.com/latex.php?latex=Y+-+%5B%5Cepsilon%2C+1-%5Cepsilon%5D&bg=ffffff&fg=333333&s=0&c=20201002) which is open in the Alexandroff extension. Now we’ll finish the proof by a trick.
which is open in the Alexandroff extension. Now we’ll finish the proof by a trick. maps closed subsets to closed subsets. It suffices to show f maps closed subsets to closed subsets. But if C is closed in X, then C is compact and thus f(C) is compact. Since Y is Hausdorff, f(C) is closed in Y. Done. ♦
maps closed subsets to closed subsets. It suffices to show f maps closed subsets to closed subsets. But if C is closed in X, then C is compact and thus f(C) is compact. Since Y is Hausdorff, f(C) is closed in Y. Done. ♦ . Map the Alexandroff extension
. Map the Alexandroff extension ![f:Y \to [0,1]](https://s0.wp.com/latex.php?latex=f%3AY+%5Cto+%5B0%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002) by taking t to itself and ∞ to 1. Once again f is continuous outside ∞. For continuity at ∞, an open subset containing 1 in [0, 1] must also contain V = (1-ε, 1] for some ε>0. But then
by taking t to itself and ∞ to 1. Once again f is continuous outside ∞. For continuity at ∞, an open subset containing 1 in [0, 1] must also contain V = (1-ε, 1] for some ε>0. But then ![f^{-1}(V) = Y - [0, 1-\epsilon]](https://s0.wp.com/latex.php?latex=f%5E%7B-1%7D%28V%29+%3D+Y+-+%5B0%2C+1-%5Cepsilon%5D&bg=ffffff&fg=333333&s=0&c=20201002) which is open in the Alexandroff extension. Hence f is continuous and we invoke the above lemma to show that it is a homeomorphism.
which is open in the Alexandroff extension. Hence f is continuous and we invoke the above lemma to show that it is a homeomorphism. containing 0. For ∞, we have V = Y–C, for a compact subset C of Q containing U. This means
containing 0. For ∞, we have V = Y–C, for a compact subset C of Q containing U. This means ![[-\epsilon, +\epsilon] \cap\mathbf{Q}](https://s0.wp.com/latex.php?latex=%5B-%5Cepsilon%2C+%2B%5Cepsilon%5D+%5Ccap%5Cmathbf%7BQ%7D&bg=ffffff&fg=333333&s=0&c=20201002) is closed in C and hence also compact, which is impossible by this lemma.
is closed in C and hence also compact, which is impossible by this lemma.![C:=[a, b] \cap \mathbf{Q}\subset \mathbf{R}](https://s0.wp.com/latex.php?latex=C%3A%3D%5Ba%2C+b%5D+%5Ccap+%5Cmathbf%7BQ%7D%5Csubset+%5Cmathbf%7BR%7D&bg=ffffff&fg=333333&s=0&c=20201002) for a<b is not compact.
for a<b is not compact. is compact.
is compact. Now V = Y–C for some closed compact subset C of X. Then
Now V = Y–C for some closed compact subset C of X. Then  Since clX(U) is closed in C, it’s compact.
Since clX(U) is closed in C, it’s compact. can be separated by open subsets. The only problem is
can be separated by open subsets. The only problem is  Pick open subset U of X containing x such that C := clX(U) is compact. Then U and Y–C are open subsets of Y which separate x and y. ♦
Pick open subset U of X containing x such that C := clX(U) is compact. Then U and Y–C are open subsets of Y which separate x and y. ♦ there’s an open subset U containing x such that cl(U) is compact.
there’s an open subset U containing x such that cl(U) is compact.
 separate x and y by open subsets
separate x and y by open subsets  such that
such that

 and C is compact, there’s a finite set of points
and C is compact, there’s a finite set of points  such that
such that  Let
Let  which gives an open subset containing x which doesn’t intersect W’. Thus, cl(W) also doesn’t intersect W’, and
which gives an open subset containing x which doesn’t intersect W’. Thus, cl(W) also doesn’t intersect W’, and  :
: , with cl(W) closed in cl(V) and hence compact. ♦
, with cl(W) closed in cl(V) and hence compact. ♦ of Y doesn’t contain an open subset whose closure in Y is compact. This is because any such open subset contains
of Y doesn’t contain an open subset whose closure in Y is compact. This is because any such open subset contains  and the closure thus contains
and the closure thus contains ![[a,b]\cap \mathbf{Q}](https://s0.wp.com/latex.php?latex=%5Ba%2Cb%5D%5Ccap+%5Cmathbf%7BQ%7D&bg=ffffff&fg=333333&s=0&c=20201002) so this
so this  where clX(V) is compact. Since V is an open subset of X contained in U, it’s also open in U; also
where clX(V) is compact. Since V is an open subset of X contained in U, it’s also open in U; also 
 By theorem 1, there exists V (open in Ui and hence in X) containing x such that
By theorem 1, there exists V (open in Ui and hence in X) containing x such that  and
and  is compact and hence closed in X. Thus
is compact and hence closed in X. Thus  and conversely,
and conversely,  So
So  and clX(V) is compact. ♦
and clX(V) is compact. ♦
 . By local compactness of X, there’s an open subset U of X containing x such that
. By local compactness of X, there’s an open subset U of X containing x such that  is compact. Thus, (x, y) is contained in U × V, whose closure
is compact. Thus, (x, y) is contained in U × V, whose closure  is compact. ♦
is compact. ♦ where each
where each  is open and equality holds for all but finitely many i. The same must hold for any open
is open and equality holds for all but finitely many i. The same must hold for any open  , is in fact compact.
, is in fact compact. is a collection of closed subsets of X such that every finite intersection
is a collection of closed subsets of X such that every finite intersection  then
then 
 so the open cover {X–Ci} has a finite subcover. This gives a finite collection of Ci with empty intersection.
so the open cover {X–Ci} has a finite subcover. This gives a finite collection of Ci with empty intersection. is an open cover of X, then
is an open cover of X, then  By F.I.P., there’s a finite collection
By F.I.P., there’s a finite collection  so
so  is a finite subcover. ♦
is a finite subcover. ♦ are non-empty compact Hausdorff spaces and
are non-empty compact Hausdorff spaces and  is a collection of continuous maps:
is a collection of continuous maps:
 where
where  and
and  for each n≥1.
for each n≥1. and each fn is the inclusion map, then no such sequence exists since the intersection of all X>n is empty.
and each fn is the inclusion map, then no such sequence exists since the intersection of all X>n is empty. which is compact by
which is compact by 
 Also
Also  is homeomorphic to
is homeomorphic to  via the following mutually inverse maps:
via the following mutually inverse maps:
 ♦
♦ is a sequence of non-empty finite sets and
is a sequence of non-empty finite sets and  such that
such that 

 with
with  such that
such that 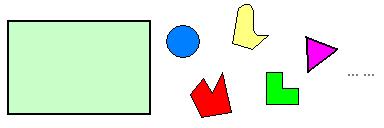

 and a point on the unit circle representing its orientation. Thus Xn can be parametrised by 2n coordinates and n points on the unit circle, which forms a subset of R4n. This subset is clearly bounded; it’s also closed because its complement is open: e. g. if two shapes have overlapping interiors, then by perturbing all shapes a little, those two shapes still overlap. Thus, by the Heine-Borel theorem, Xn is compact. The above proposition tells us there’s a way to fit all shapes in. ♦
and a point on the unit circle representing its orientation. Thus Xn can be parametrised by 2n coordinates and n points on the unit circle, which forms a subset of R4n. This subset is clearly bounded; it’s also closed because its complement is open: e. g. if two shapes have overlapping interiors, then by perturbing all shapes a little, those two shapes still overlap. Thus, by the Heine-Borel theorem, Xn is compact. The above proposition tells us there’s a way to fit all shapes in. ♦ there’s a way to pack every finite set of rectangles in the square, but if we attempt to pack the entire infinite set, some of them must share an edge and thus overlap.
there’s a way to pack every finite set of rectangles in the square, but if we attempt to pack the entire infinite set, some of them must share an edge and thus overlap. then we can find a finite set of indices
then we can find a finite set of indices  such that
such that  On an intuitive level, one should imagine a compact space as being constrained, and is the topological equivalent of a finite set.
On an intuitive level, one should imagine a compact space as being constrained, and is the topological equivalent of a finite set.
 there exists a finite set of indices
there exists a finite set of indices 
 we have
we have  and each
and each  is open in Y. Thus, there’s a finite subcover
is open in Y. Thus, there’s a finite subcover  which gives
which gives 
 be an open cover of Y. Each
be an open cover of Y. Each  for some open subset Ui of X. Now
for some open subset Ui of X. Now  By assumption, there’s a finite set of indices
By assumption, there’s a finite set of indices  such that
such that  which gives
which gives  ♦
♦ Then
Then 
 .
.
 and Y is compact, we can find a finite subcover:
and Y is compact, we can find a finite subcover: 
 which is open in X and contains x. Since
which is open in X and contains x. Since  for each k, we have
for each k, we have  which contradicts the fact that x is a point of accumulation of Y. ♦
which contradicts the fact that x is a point of accumulation of Y. ♦ Letting
Letting  we have
we have
 which gives
which gives  By the above lemma, f(X) is compact. ♦
By the above lemma, f(X) is compact. ♦ are compact, then so is
are compact, then so is  Thus a finite union of compact subspaces is compact.
Thus a finite union of compact subspaces is compact. and Y is compact, there’s a finite set of indices
and Y is compact, there’s a finite set of indices  such that
such that  Then
Then  so
so  in X must have a subsequence which converges to a in X. Since
in X must have a subsequence which converges to a in X. Since  ♦
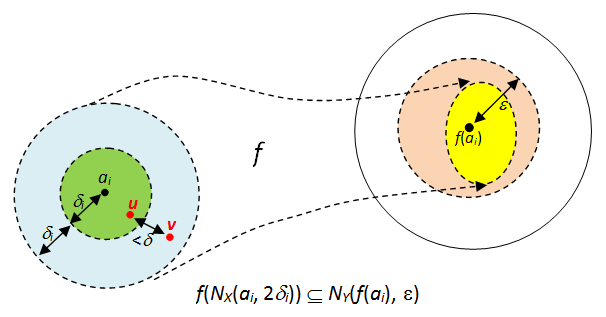
♦ , continuity at a means there’s a δ>0 such that
, continuity at a means there’s a δ>0 such that  Now the collection of the open balls
Now the collection of the open balls  covers X, so it has a finite subcover
covers X, so it has a finite subcover where
where 
 Now whenever
Now whenever 
 for some 1 ≤ i ≤ n;
for some 1 ≤ i ≤ n; ;
; and
and  ;
;
 which covers X, has a finite subcover.
which covers X, has a finite subcover. as a union of basic open sets
as a union of basic open sets  Then
Then  and there must be a finite subcover
and there must be a finite subcover
 we have
we have  which covers X, has a finite subcover.
which covers X, has a finite subcover. of basic open sets which covers X but with no finite subcover. We’ll assume Σ is “maximal”, i.e.
of basic open sets which covers X but with no finite subcover. We’ll assume Σ is “maximal”, i.e. the collection
the collection  has a finite subcover, which must include V. [ Note: we don’t assume there’s a unique maximal Σ. ]
has a finite subcover, which must include V. [ Note: we don’t assume there’s a unique maximal Σ. ] satisfy
satisfy  then we have
then we have  for some i. [ Indeed, if each
for some i. [ Indeed, if each  then maximality implies
then maximality implies  has a finite subcover, say
has a finite subcover, say  where each
where each  Then
Then  is a finite subcover of Σ. Contradiction. ]
is a finite subcover of Σ. Contradiction. ] such that
such that  Since V is a basic open set, write
Since V is a basic open set, write  for
for  The above condition then implies
The above condition then implies  for some i. Since
for some i. Since  we see that
we see that
 forms a subbasis for X. Suppose we have an open cover of X of the form {Vi}. Then for some index i, the union of Ui‘s which appear must be the whole of Xi; otherwise, for each i, pick some
forms a subbasis for X. Suppose we have an open cover of X of the form {Vi}. Then for some index i, the union of Ui‘s which appear must be the whole of Xi; otherwise, for each i, pick some  and the tuple
and the tuple  is not in the union of {Vi}. By compactness of Xi, there’s a finite subcover via the {Ui}, so X has a finite subcover via the {Vi}. ♦
is not in the union of {Vi}. By compactness of Xi, there’s a finite subcover via the {Ui}, so X has a finite subcover via the {Vi}. ♦![X\subseteq [0, 1].](https://s0.wp.com/latex.php?latex=X%5Csubseteq+%5B0%2C+1%5D.&bg=ffffff&fg=333333&s=0&c=20201002) By proposition 1, it suffices to prove X = [0, 1] is compact. Since we can pick a subbasis of R comprising of (-∞, b) and (a, ∞), we can
By proposition 1, it suffices to prove X = [0, 1] is compact. Since we can pick a subbasis of R comprising of (-∞, b) and (a, ∞), we can ![\{[0, b_i)\}_i \cup \{(a_j, 1]\}_j.](https://s0.wp.com/latex.php?latex=%5C%7B%5B0%2C+b_i%29%5C%7D_i+%5Ccup+%5C%7B%28a_j%2C+1%5D%5C%7D_j.&bg=ffffff&fg=333333&s=0&c=20201002) Since:
Since: and
and ![\cup_j (a_j, 1] = (\inf a_j, 1]](https://s0.wp.com/latex.php?latex=%5Ccup_j+%28a_j%2C+1%5D+%3D+%28%5Cinf+a_j%2C+1%5D&bg=ffffff&fg=333333&s=0&c=20201002)
 Then there exist i, j such that
Then there exist i, j such that  so there’s a finite subcover
so there’s a finite subcover ![\{[0, b_i), (a_j, 1]\}.](https://s0.wp.com/latex.php?latex=%5C%7B%5B0%2C+b_i%29%2C+%28a_j%2C+1%5D%5C%7D.&bg=ffffff&fg=333333&s=0&c=20201002) By Alexander’s Subbase Theorem, X is compact. ♦
By Alexander’s Subbase Theorem, X is compact. ♦ then either α ≤ β or β ≤ α.
then either α ≤ β or β ≤ α. is a totally ordered subset, there’s an upper bound
is a totally ordered subset, there’s an upper bound  of T, i.e. s ≥ t for all
of T, i.e. s ≥ t for all 

 is a collection of non-empty sets, then the product
is a collection of non-empty sets, then the product  is non-empty. This looks deceptively obvious, so we’ll just take it at face value while sweeping the philosophical ramifications under the rug (or continue the discussion another time). Read the
is non-empty. This looks deceptively obvious, so we’ll just take it at face value while sweeping the philosophical ramifications under the rug (or continue the discussion another time). Read the  is an open cover of X without any finite subcover.
is an open cover of X without any finite subcover.
 which is totally ordered and each
which is totally ordered and each  satisfies (*). Totally ordered means for any i, j, either
satisfies (*). Totally ordered means for any i, j, either  or
or 
 We’ll prove Σ satisfies (*) as well.
We’ll prove Σ satisfies (*) as well.
 Since there’re only finitely many such i‘s and
Since there’re only finitely many such i‘s and  the cover
the cover 
 really ought to converge to 0, but that limit is not found in the space.
really ought to converge to 0, but that limit is not found in the space.
 for various m is not bounded, so there exists m>n for which
for various m is not bounded, so there exists m>n for which 
 But by sequential compactness of Y we must have a subsequence
But by sequential compactness of Y we must have a subsequence  which converges to an element of Y. Thus
which converges to an element of Y. Thus  indeed. ♦
indeed. ♦ Then
Then  is also a convergent subsequence of (yn).
is also a convergent subsequence of (yn). there’s also a subsequence
there’s also a subsequence  which converges to b in Y. Since
which converges to b in Y. Since  is a subsequence of
is a subsequence of  it also converges to a. Thus
it also converges to a. Thus  To prove the converse apply the property above to projection maps X × Y → X and X × Y → Y.
To prove the converse apply the property above to projection maps X × Y → X and X × Y → Y.![X\subseteq [0, \frac 2 3]^n](https://s0.wp.com/latex.php?latex=X%5Csubseteq+%5B0%2C+%5Cfrac+2+3%5D%5En&bg=ffffff&fg=333333&s=0&c=20201002) , in which case proposition 2 tells us we only need to show
, in which case proposition 2 tells us we only need to show ![[0, \frac 2 3]^n](https://s0.wp.com/latex.php?latex=%5B0%2C+%5Cfrac+2+3%5D%5En&bg=ffffff&fg=333333&s=0&c=20201002) is sequentially compact and for that, it suffices to show X = [0, 2/3] is sequentially compact. For a sequence (xn) in X, write out the decimal expansion of each xn; if more than one expression exists, pick any one. Each xn may be written in the form (0.abcd…).
is sequentially compact and for that, it suffices to show X = [0, 2/3] is sequentially compact. For a sequence (xn) in X, write out the decimal expansion of each xn; if more than one expression exists, pick any one. Each xn may be written in the form (0.abcd…). This gives
This gives ![r = (0.d_1 d_2 d_3\ldots) \in [0, \frac 2 3].](https://s0.wp.com/latex.php?latex=r+%3D+%280.d_1+d_2+d_3%5Cldots%29+%5Cin+%5B0%2C+%5Cfrac+2+3%5D.&bg=ffffff&fg=333333&s=0&c=20201002) Clearly, there’s a subsequence of (xn) converging to r. Since xn ≤ 2/3, we also have r ≤ 2/3. ♦
Clearly, there’s a subsequence of (xn) converging to r. Since xn ≤ 2/3, we also have r ≤ 2/3. ♦ and
and  ]
] which contradicts the fact that each
which contradicts the fact that each  contains only finitely many terms of the sequence.
contains only finitely many terms of the sequence. Replacing (xn) with
Replacing (xn) with 

 is a net indexed by directed set I, then a subnet is given by
is a net indexed by directed set I, then a subnet is given by  for some subset J of I such that:
for some subset J of I such that: , there exists an index j ≥ i contained in J (note that this condition implies J is a directed set).
, there exists an index j ≥ i contained in J (note that this condition implies J is a directed set). This gives a subnet (xj) which converges to a. Contradiction. ]
This gives a subnet (xj) which converges to a. Contradiction. ] we can find a finite subset {a1, a2, …, an} of X such that
we can find a finite subset {a1, a2, …, an} of X such that  Also for each k=1, …, n, there’s an index ik such that U(ak) does not contain xj for all j ≥ ik. Since I is a directed set, we’ll pick j ≥ all ik‘s, and so
Also for each k=1, …, n, there’s an index ik such that U(ak) does not contain xj for all j ≥ ik. Since I is a directed set, we’ll pick j ≥ all ik‘s, and so  does not contain xj which is absurd.
does not contain xj which is absurd. is an open cover of X indexed by J. We construct a net as follows: the index set is I, the collection of all finite subsets of J, ordered by inclusion. Thus, if
is an open cover of X indexed by J. We construct a net as follows: the index set is I, the collection of all finite subsets of J, ordered by inclusion. Thus, if  then
then  For each
For each  define the open subset
define the open subset  If {Uj} has no finite subcover, then each US ≠ X so we can pick
If {Uj} has no finite subcover, then each US ≠ X so we can pick  This gives a net (xS).
This gives a net (xS).
 If we pick T containing j, then
If we pick T containing j, then  so
so  which is a contradiction. ♦
which is a contradiction. ♦
 and
and  are complete metric spaces, then so is
are complete metric spaces, then so is  where d can be any one of the following metrics:
where d can be any one of the following metrics: ;
; ;
; .
. in X × Y is Cauchy, then
in X × Y is Cauchy, then  are Cauchy in X and Y respectively. Hence, they’re both convergent, say, to
are Cauchy in X and Y respectively. Hence, they’re both convergent, say, to 
 is convergent. ♦
is convergent. ♦ is a countably infinite collection of complete metric spaces. Construct a metric on
is a countably infinite collection of complete metric spaces. Construct a metric on  as
as  Now Z is closed in Y so it is complete by proposition 1 above. Furthermore, X is dense in Z by definition. So
Now Z is closed in Y so it is complete by proposition 1 above. Furthermore, X is dense in Z by definition. So  is now a completion. In other words, the third condition enforces a minimality condition on Y. One can visualise Y as filling up the gaps of X.
is now a completion. In other words, the third condition enforces a minimality condition on Y. One can visualise Y as filling up the gaps of X. to a complete metric space Z, there is a unique continuous
to a complete metric space Z, there is a unique continuous  such that
such that 
 is a Cauchy sequence in Y, then it converges to some y, so
is a Cauchy sequence in Y, then it converges to some y, so  is convergent and must also be Cauchy.
is convergent and must also be Cauchy. then since X is dense in Y and Z is Hausdorff, we have g = g’.
then since X is dense in Y and Z is Hausdorff, we have g = g’. since X is dense in Y, y is a limit of a sequence (xn) in X. Then (xn) is Cauchy and since f is Cauchy-continuous, (f(xn)) is Cauchy in Z. So (f(xn)) converges to some z and we let g(y) = z.
since X is dense in Y, y is a limit of a sequence (xn) in X. Then (xn) is Cauchy and since f is Cauchy-continuous, (f(xn)) is Cauchy in Z. So (f(xn)) converges to some z and we let g(y) = z.
 We need to show
We need to show  have the same limit. It suffices to show
have the same limit. It suffices to show  as n → ∞.
as n → ∞. and
and 

 since if
since if  we can pick the constant sequence (y, y, …) in X.
we can pick the constant sequence (y, y, …) in X. then
then  Now since X is dense in Y, we can pick a sequence
Now since X is dense in Y, we can pick a sequence  This gives
This gives  also. From our definition of g, we must have
also. From our definition of g, we must have  so we’re done. ♦
so we’re done. ♦ are both completions, then there is a unique homeomorphism f : Y → Y’ which restricts to the identity map on X.
are both completions, then there is a unique homeomorphism f : Y → Y’ which restricts to the identity map on X. and
and  be the injections. Since i and j are uniformly continuous, by the universal property (U.P.) on Y, there exists a unique uniformly continuous
be the injections. Since i and j are uniformly continuous, by the universal property (U.P.) on Y, there exists a unique uniformly continuous  which extends the identity map idX on X. Likewise, by the U.P. on Y’, there is a unique uniformly continuous
which extends the identity map idX on X. Likewise, by the U.P. on Y’, there is a unique uniformly continuous  extending idX. Composing gives uniformly continuous maps
extending idX. Composing gives uniformly continuous maps  and
and  extending idX. By uniqueness in U.P., both
extending idX. By uniqueness in U.P., both  and
and  must be identity maps. ♦
must be identity maps. ♦ , then the completion of X’ is its closure in Y.
, then the completion of X’ is its closure in Y. so X1 × X2 is dense in Y1 × Y2. ♦
so X1 × X2 is dense in Y1 × Y2. ♦ extends to a uniformly continuous
extends to a uniformly continuous 
 to obtain a uniformly continuous map
to obtain a uniformly continuous map  to a complete space. By universal property of Y2, this extends to a uniformly continuous
to a complete space. By universal property of Y2, this extends to a uniformly continuous  such that
such that  ♦
♦ which takes t to exp(2πit). We leave it to the reader to prove its uniform continuity. The induced map on the completion is
which takes t to exp(2πit). We leave it to the reader to prove its uniform continuity. The induced map on the completion is ![[0, 1]\to \{z\in\mathbf{C} : |z|=1\}](https://s0.wp.com/latex.php?latex=%5B0%2C+1%5D%5Cto+%5C%7Bz%5Cin%5Cmathbf%7BC%7D+%3A+%7Cz%7C%3D1%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002) which takes t to exp(2πit) as well, and this is not injective.
which takes t to exp(2πit) as well, and this is not injective. write
write  if
if 
 are represented by Cauchy sequences
are represented by Cauchy sequences  we define the distance function to be:
we define the distance function to be:
 is Cauchy. To do that, note that for all m, n:
is Cauchy. To do that, note that for all m, n:
 which gives:
which gives:
 are Cauchy, for any ε>0, we can find N such that whenever m, n > N, we have
are Cauchy, for any ε>0, we can find N such that whenever m, n > N, we have  Thus
Thus  is Cauchy.
is Cauchy. and
and  Arguing as in step 2, we obtain:
Arguing as in step 2, we obtain:
 and
and  on the RHS tends to 0. Hence d’ is well-defined.
on the RHS tends to 0. Hence d’ is well-defined. Then
Then  , so
, so  Then we have
Then we have  for each n. Taking the limit of each term, we get the triangular inequality for d’.
for each n. Taking the limit of each term, we get the triangular inequality for d’. be represented by
be represented by  We claim that (xn), as a sequence in Y, converges to y; i.e.
We claim that (xn), as a sequence in Y, converges to y; i.e. 
 Fixing n, and taking the limit as m→∞, we get
Fixing n, and taking the limit as m→∞, we get  Thus, we’re done.
Thus, we’re done. We claim that
We claim that 
 Thus, when m, n > N, we have
Thus, when m, n > N, we have  and
and 
 Indeed, we have:
Indeed, we have:
 since
since  And we’re done. ♦
And we’re done. ♦


 iff
iff  and
and 

 which exists by assumption.
which exists by assumption. which converges to both x and y, which is a contradiction. ♦
which converges to both x and y, which is a contradiction. ♦ which takes x to (x, x) has a closed image
which takes x to (x, x) has a closed image 
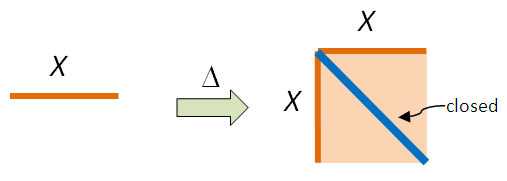
 So (X×X)-Δ(X) is open.
So (X×X)-Δ(X) is open. must be contained in a basic open subset
must be contained in a basic open subset  for some open
for some open  Then U, V are open subsets of X containing x, y respectively and they’re disjoint since U × V is a subset of W. ♦
Then U, V are open subsets of X containing x, y respectively and they’re disjoint since U × V is a subset of W. ♦ is an injective continuous map and X is Hausdorff, then so is Y. In particular, a subspace of a Hausdorff space is Hausdorff.
is an injective continuous map and X is Hausdorff, then so is Y. In particular, a subspace of a Hausdorff space is Hausdorff.

 are disjoint, then so are f(a), f(b). Since X is Hausdorff, we can find disjoint open subsets U, V of X containing f(a), f(b) respectively. Then
are disjoint, then so are f(a), f(b). Since X is Hausdorff, we can find disjoint open subsets U, V of X containing f(a), f(b) respectively. Then  are disjoint open subsets of Y containing a, b respectively.
are disjoint open subsets of Y containing a, b respectively. Then
Then  are the desired open subsets of X. Otherwise,
are the desired open subsets of X. Otherwise,  belong to the same component; since this is Hausdorff, we can find disjoint open subsets
belong to the same component; since this is Hausdorff, we can find disjoint open subsets  containing x, y respectively. But
containing x, y respectively. But  is open, hence so are
is open, hence so are  are distinct, there’s an index i such that
are distinct, there’s an index i such that  Since
Since  containing
containing  respectively. Then the open slices
respectively. Then the open slices  and
and  are disjoint open subsets of X containing
are disjoint open subsets of X containing  respectively. ♦
respectively. ♦ , is not Hausdorff if |X|>1.
, is not Hausdorff if |X|>1. then saying Y is dense in Z means
then saying Y is dense in Z means  But since
But since  this is equivalent to saying clX(Y) contains Z. In particular, given any subset Y of X, taking the closure in X gives
this is equivalent to saying clX(Y) contains Z. In particular, given any subset Y of X, taking the closure in X gives  Setting Z = clX(Y), we see that Y is dense in Z.
Setting Z = clX(Y), we see that Y is dense in Z.
 which holds if and only if X–Y has no non-empty subset open in X. This is the same as saying any non-empty open subset of X intersects Y. ♦
which holds if and only if X–Y has no non-empty subset open in X. This is the same as saying any non-empty open subset of X intersects Y. ♦ are continuous functions to a Hausdorff space Z. If Y is a dense subset of X such that
are continuous functions to a Hausdorff space Z. If Y is a dense subset of X such that  then f=g.
then f=g. .
. so W is a non-empty open subset of X.
so W is a non-empty open subset of X.
 and
and  Yet U, V are disjoint, which gives us a contradiction. ♦
Yet U, V are disjoint, which gives us a contradiction. ♦ is a surjective continuous map and Y is a dense subset of X, then f(Y) is dense in Z.
is a surjective continuous map and Y is a dense subset of X, then f(Y) is dense in Z. is dense, then so is
is dense, then so is 

 be open and non-empty. Then
be open and non-empty. Then  for some i. Since U ∩ Xi is a non-empty open subset of Xi, it must intersect Yi, and hence, Y. Thus, U intersects Y.
for some i. Since U ∩ Xi is a non-empty open subset of Xi, it must intersect Yi, and hence, Y. Thus, U intersects Y.
