
A related notion of connectedness is this:
Definition. A path on a topological space X is a continuous map
The path is said to connect x and y in X if f(0)=x and f(1)=y. X is said to be path-connected if any two points can be connected by a path.

In a sense, path-connectedness is more active since one requires an explicit path to establish it, while the earlier connectedness is more passive since it simply indicates a failure to decompose as a topological disjoint union. The two are obviously related, starting from:
Theorem 1. A path-connected space X is connected.
Proof.
Suppose X is path-connected but not connected. There’s a surjective continuous map 

![g:[0, 1] \to X](https://s0.wp.com/latex.php?latex=g%3A%5B0%2C+1%5D+%5Cto+X&bg=ffffff&fg=333333&s=0&c=20201002)
![f\circ g:[0, 1] \to\{0,1\}](https://s0.wp.com/latex.php?latex=f%5Ccirc+g%3A%5B0%2C+1%5D+%5Cto%5C%7B0%2C1%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002)
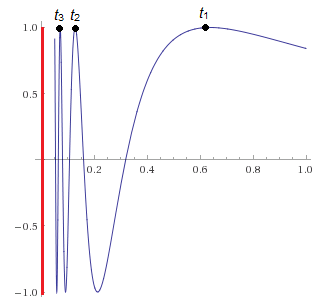
 The converse is not true: the topologist’s sine curve is connected but not path-connected. Let
The converse is not true: the topologist’s sine curve is connected but not path-connected. Let 
![Y = \{0\}\times [0, 1],](https://s0.wp.com/latex.php?latex=Y+%3D+%5C%7B0%5C%7D%5Ctimes+%5B0%2C+1%5D%2C&bg=ffffff&fg=333333&s=0&c=20201002)

To see why it’s not path-connected, suppose ![f:[0, 1] \to X](https://s0.wp.com/latex.php?latex=f%3A%5B0%2C+1%5D+%5Cto+X&bg=ffffff&fg=333333&s=0&c=20201002)
Let 
![\pi_x \circ f:[0, 1]\to \mathbf{R}](https://s0.wp.com/latex.php?latex=%5Cpi_x+%5Ccirc+f%3A%5B0%2C+1%5D%5Cto+%5Cmathbf%7BR%7D&bg=ffffff&fg=333333&s=0&c=20201002)

![t_0, t_1, t_2, \ldots \in [0, 1]](https://s0.wp.com/latex.php?latex=t_0%2C+t_1%2C+t_2%2C+%5Cldots+%5Cin+%5B0%2C+1%5D&bg=ffffff&fg=333333&s=0&c=20201002)

Since [0, 1] is compact, f is uniformly continuous. So there exists ε>0 such that whenever ![t, u\in [0, 1]](https://s0.wp.com/latex.php?latex=t%2C+u%5Cin+%5B0%2C+1%5D&bg=ffffff&fg=333333&s=0&c=20201002)






[ Notice it took quite a bit of effort to prove a seemingly obvious claim, and we needed compactness to prove it. ]
Note also that X is closed in R2, and every point in Y is a point of accumulation of Z, so cl(Z) = X. In short, we have the first bummer.
Conclusion. The closure of a path-connected subset Y of X is not necessarily path-connected.

Thankfully, the next result does carry over.
Proposition 2. If
is a continuous map of topological spaces and X is path-connected, then so is f(X).
Proof.
For any 




![g\circ f:[0, 1] \to Y](https://s0.wp.com/latex.php?latex=g%5Ccirc+f%3A%5B0%2C+1%5D+%5Cto+Y&bg=ffffff&fg=333333&s=0&c=20201002)


Proposition 3. If
is a collection of path-connected subspaces of X and
then so is

Proof (Sketchy).
Pick 



Proposition 4. If
is a collection of path-connected spaces, then
is also path-connected.
Proof.
Let 

![f_i :[0,1]\to X_i](https://s0.wp.com/latex.php?latex=f_i+%3A%5B0%2C1%5D%5Cto+X_i&bg=ffffff&fg=333333&s=0&c=20201002)

![f:[0, 1]\to X](https://s0.wp.com/latex.php?latex=f%3A%5B0%2C+1%5D%5Cto+X&bg=ffffff&fg=333333&s=0&c=20201002)

To check that f is continuous, let’s use the universal property of products. It suffices to show ![\pi_i \circ f : [0,1]\to X_i](https://s0.wp.com/latex.php?latex=%5Cpi_i+%5Ccirc+f+%3A+%5B0%2C1%5D%5Cto+X_i&bg=ffffff&fg=333333&s=0&c=20201002)


Note
Once again, this fails for the box topology on 

Path-Connected Components
As before, we obtain the concept of path-connected components. We define, for points x, y in X, a relation x ~ y if and only if they belong to some path-connected component. Proposition 3 then tells us this gives an equivalence relation.
Definition. The equivalence classes of the above-mentioned relation are called the path-connected components.
Since a path-connected component is automatically connected, each connected component is a disjoint union of path-connected components.
Examples
- It’s easy to see that any interval (closed, open or half-open) is path-connected. In particular, it’s connected.
- Hence
is a disjoint union of
and
each of which is a path-connected component.
- The squares [0, 1] × [0, 1] and (0, 1) × (0, 1) are path-connected by proposition 4.
- Consider Q as a subspace of R. Since the connected components are singleton sets, the path-connected components can’t break them down any further.
- Take the topologist’s sine curve
above. Y and Z are both path-connected since they’re homeomorphic to intervals. Since X is not path-connected, the path-connected components must be Y and Z. Note that Y is open while Z is closed in X. This is one example where connected components decompose further into path-connected components.

Very helpful post.
Thaanks for a great read