[ Warning: this is primarily an expository article, so the proofs are not airtight, but they should be sufficiently convincing. ]
The five platonic solids were well-known among the ancient Greeks (V, E, F denote the number of vertices, edges and faces respectively):
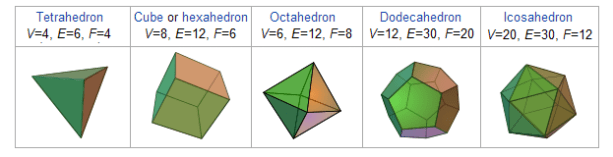
[ Images edited from wikipedia.org. ]
In all cases, we have V–E+F=2. In fact, the same equality holds for any polyhedron which can be “deformed” into the surface of a ball. For example, if we have a pyramid with an n-gon as a base, then V=n+1, E=2n, F=n+1 which gives V–E+F=2. Or, we can glue a pyramid with a square base to a cube (assuming the side lengths match), and obtain V=9, E=16, F=9. Let’s state and prove this result.
Theorem 1. A convex polyhedron whose surface comprises of V vertices, E edges and F faces satisfies V–E+F=2.
Proof
Being convex, the polyhedron can be enclosed in a sphere and its surface projected bijectively to the surface of the sphere. This gives a partition of the sphere’s surface into polygons (called a cellular decomposition). For any two cellular decompositions P and P’, we say that P’ is a refinement of P if all vertices and edges of P are also in P’.
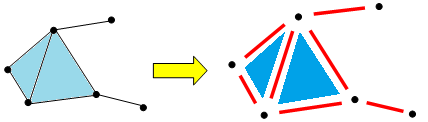
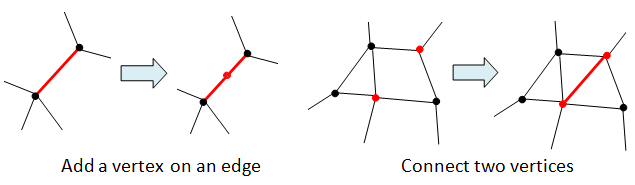
Since any two cellular decompositions have a common refinement, it suffices to show that if P’ is a refinement of P, then they have the same V–E+F. Now any refinement may be obtained from a sequence of steps, each of which is one of the two following types:

The left step changes (V, E, F) to (V+1, E+1, F) since it adds a vertex and an edge without introducing any new face. The right step changes (V, E, F) to (V, E+1, F+1). In both cases, there is no change to V–E+F. Hence this value is constant across all decompositions of the sphere and picking any single example gives V–E+F=2. ♦

The above proof, while simple, has a few hidden pitfalls for the unwary. For more details, the interested reader may refer to Imre Lakatos’ book “Proofs and Refutations” for a rather in-depth look at the underlying issues as well as their historical relevance.
The simple V–E+F formula has some interesting applications.
Example 1
Let’s prove that there are at most 5 platonic solids. Suppose we have a polyhedron with F faces, each of which is an n-gon with m edges meeting at each vertex. Then E = Fn/2 and V = 2E/m. The formula V–E+F = 2 gives

Since m, n ≥ 3, it’s easy to see that this inequality only holds for (m, n) = (3, 3), (3, 4), (3, 5), (4, 3), (5, 3), after which one can show that each case has at most one platonic solid.
Example 2
The utility graph cannot be drawn on the sphere (and hence on the plane) without intersecting edges. Indeed, if it could, we would have V=6, E=9, and so F = 2-V+E = 5. But since the graph has no triangles, each face has at least 4 edges and this gives at least 5×4/2 = 10 edges, which is a contradiction.
Exercise. Prove that the complete graph with 5 vertices cannot be drawn on the sphere without intersecting edges. Read up on planar graphs.

Other Surfaces
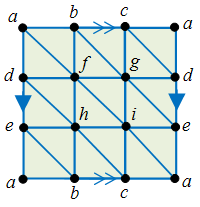
A closer look at the proof of thereom 1 indicates that V–E+F is constant for any cellular decomposition of a suitably nice surface. For example, on the surface of a torus (doughnut), the following decomposition gives – after unfolding – four faces of rectangles.
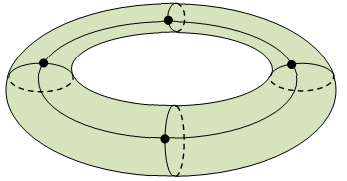
Hence V=4, E=8, F=4, and V–E+F=0. This suggests that V–E+F is an indication of the global topological property of the shape. We will call this the Euler characteristic of the surface. If we partition the surface of a two-holed doughnut, we find that its Euler characteristic is -2, and so on. This suggests the following.
Proposition 2.
The Euler characteristic of the surface of a g-holed torus is 2-2g.

We will leave the proof to the reader since it is a matter of straightforward computation.
In fact, we don’t have to restrict ourselves to smooth surfaces (the formal terminology is called closed manifolds); let’s look at some surfaces with edges.
Example 3
For a square, we have V=4, E=4, F=1, so the Euler characteristic = 1. Or, we can partition it into two triangles and get V=4, E=5, F=2.
Example 4
Consider the Möbius strip which is obtained by gluing a pair of opposite sides of a square by flipping over one edge. By dividing the square into two triangles, we get V=2 (since A=D, B=C), E=4 (since AC=DB) and F=2, so the Euler characteristic is 0.

Example 5
The Klein bottle is obtained by gluing the two opposite sides of the Möbius strip together, i.e. AB to CD (preserving the direction). This gives V=1 (since A=B=C=D), E=3 and F=2 so the Euler characteristic is 0.
Example 6
The projective plane is obtained by gluing the oppposite edges of a square in opposite directions, as follows.

This gives V=2 (since the opposite vertices of the square are glued together), E=2, F=1, and the Euler characteristic is 1.
Example 7
In fact, you don’t even need the surface to be connected. Indeed, it’s clear that if X is the topological disjoint union of M and N, and χ(X) denotes the Euler characteristic of X, then

More generally, we have the following result:
Principle of Inclusion and Exclusion. Suppose X is the union of M and N. Then  .
.
Proof
Find a cellular decomposition of M and of N, then form a decomposition of X which is a refinement of both. The result then follows easily by counting the number of times each vertex/edge/face appears in M and N. ♦
Exercise
- Draw the utility graph on the surface T of a torus such that the edges do not intersect. [Solution.]
- Do the same with the complete graph on 5 vertices.
- Find the largest n for which we can embed the complete graph on n vertices on T.
- Read up on toroidal graphs, or more generally, topological graph theory.
Other Dimensions
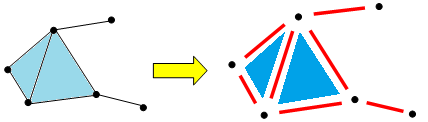
The Euler characteristic can be generalised to objects of arbitrary dimensions. For one dimensional objects, they can be represented by graphs. E.g. the nuclear disarmament symbol can be represented by a graph with V=5 vertices and E=8 edges so the Euler characteristic is now χ = V–E = -3.

Graphically, χ = 1-c where c is the number of “holes” in the diagram. It’s easy to show that the Euler characteristic χ = V–E for 1-dimensional objects is well-defined, i.e. independent of the graph representation we pick. Indeed, the proof is identical to before (that of theorem 1), except that in this case we can only add a vertex to an edge, since connecting two vertices completely changes the object.
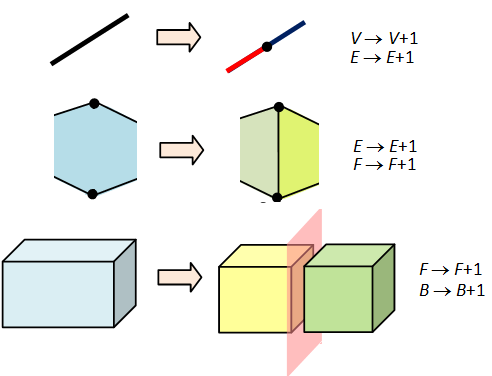
Thus, for a general geometric object, we can add a vertex to break an edge into two, or an edge to break a face into two, or a face to divide a block into two, … , as illustrated by the following (B denotes the number of 3-dimensional blocks):

This shows that for a 3-dimensional object, its Euler characteristic χ = V–E+F–B is constant. Clearly we can generalise this to arbitrarily many dimensions: if a cellular decomposition of M comprises of  cells of dimension i, then its Euler characteristic
cells of dimension i, then its Euler characteristic

is independent of the decomposition.
Example 8
Consider a solid cube. We already know that the surface of a cube satisfies V–E+F=2. Hence, the solid cube has χ = 2-1 = 1.
Example 9
Now consider a solid cube with a small cubical hole at the centre. We could partition this solid as a union of 6 pieces of the form:
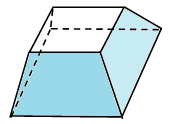
which gives us B=6, F=24, E=32, V=16 (after some careful counting!) and so χ=2.
Or, we could also use the principle of inclusion and exclusion (whose proof clearly generalises to any geometric shapes). If M is the above cube with a hole, and N is the small cube at the centre, then their union is the large cube and their intersection is the surface of a cube, so we have:

which we already know is 2.
Example 10
Consider the case of dimension 0, where we have a discrete set of points. The Euler characteristic is then the cardinality of this set (i.e. number of elements in it).
Simplicial Complexes
Let us now define in a more precise manner what objects we’re looking at. Heuristically, we start with a set S of points. A simplicial complex is then represented by a collection C of subsets of S such that if  , then every subset of T also lies in C.
, then every subset of T also lies in C.
For example, if S = {1, 2, 3, 4} and C = { Ø, {1}, {2}, {3}, {4} {1,2}, {2,3}, {1,3}, {2,4}, {1,2,3} }, then the corresponding simplicial complex is:

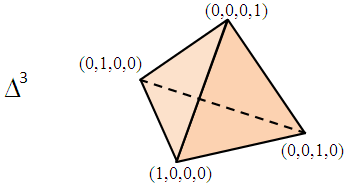
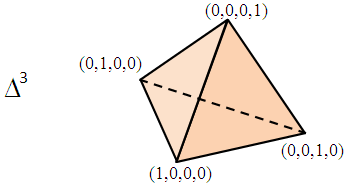
The formal topological definition is as follows: the n-dimensional simplex is the set

or its affine transform. For example, here’s a 3-dimensional simplex.
The boundary of  comprises of (n+1) simplices of dimension (n-1), each corresponding to an 0 ≤ i ≤ n, for which we take the set of
comprises of (n+1) simplices of dimension (n-1), each corresponding to an 0 ≤ i ≤ n, for which we take the set of  satisfying
satisfying  Now take each element
Now take each element  and form the corresponding simplex
and form the corresponding simplex

Now the simplicial complex for Σ is the topological space which is the subspace  In other words, the objects we’re looking are topological spaces which are homeomorphic to a simplicial complex. Note that even though the construction of a simplicial complex only uses line segments, triangles, tetrahedrons, and their higher-dimensional counterparts, its cellular decomposition may use more general shapes such as quadrilaterals, pentagons, cubes etc.
In other words, the objects we’re looking are topological spaces which are homeomorphic to a simplicial complex. Note that even though the construction of a simplicial complex only uses line segments, triangles, tetrahedrons, and their higher-dimensional counterparts, its cellular decomposition may use more general shapes such as quadrilaterals, pentagons, cubes etc.
Note: simplicial complexes are somewhat restrictive. A more general theory involves CW-complexes. The differences are subtle, and while CW-complexes may define some structures which are not homeomorphic to any simplicial complex (see here for some anomalous examples), the two theories are equivalent at the level of homotopic equivalence, which we will define in the next article.
Multiplicativity of χ
Finally, we have the following result.
Theorem. If M and N are geometric objects, we have χ(M × N) = χ(M) × χ(N).
Proof
First, note that each cellular decomposition of a geometric object gives a disjoint union of the underlying set of points:
Write  and
and  as disjoint unions in this way (some of the Mi‘s or Nj‘s may have the same dimension). Then their Euler characteristics are given by:
as disjoint unions in this way (some of the Mi‘s or Nj‘s may have the same dimension). Then their Euler characteristics are given by:

Now  and
and  so the Euler characteristic of M × N is:
so the Euler characteristic of M × N is:

which is χ(M)χ(N). ♦
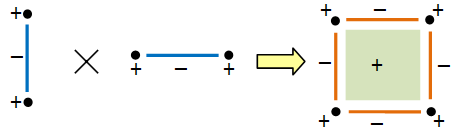
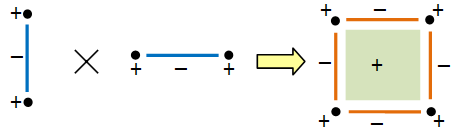
Here’s a graphical representation of the above proof.

![K[G] \cong \prod_{i=1}^k M_{n_i}(K)](https://s0.wp.com/latex.php?latex=K%5BG%5D+%5Ccong+%5Cprod_%7Bi%3D1%7D%5Ek+M_%7Bn_i%7D%28K%29&bg=ffffff&fg=333333&s=0&c=20201002)
![|G| = \dim_K K[G] = \sum_{i=1}^k \dim(V_i)^2](https://s0.wp.com/latex.php?latex=%7CG%7C+%3D+%5Cdim_K+K%5BG%5D+%3D+%5Csum_%7Bi%3D1%7D%5Ek+%5Cdim%28V_i%29%5E2&bg=ffffff&fg=333333&s=0&c=20201002)

, where V runs through all simple K[G]-modules, forms an orthonormal basis of the space of class functions.

![\alpha = \sum_{g\in G} f(g^{-1})\cdot g \in K[G].](https://s0.wp.com/latex.php?latex=%5Calpha+%3D+%5Csum_%7Bg%5Cin+G%7D+f%28g%5E%7B-1%7D%29%5Ccdot+g+%5Cin+K%5BG%5D.&bg=ffffff&fg=333333&s=0&c=20201002)
![\alpha g = g\alpha \in K[G]](https://s0.wp.com/latex.php?latex=%5Calpha+g+%3D+g%5Calpha+%5Cin+K%5BG%5D&bg=ffffff&fg=333333&s=0&c=20201002)








![\mathbf{R}[G] \cong V_{\text{triv}} \oplus V_i \oplus V_j \oplus V_k \oplus W](https://s0.wp.com/latex.php?latex=%5Cmathbf%7BR%7D%5BG%5D+%5Ccong+V_%7B%5Ctext%7Btriv%7D%7D+%5Coplus+V_i+%5Coplus+V_j+%5Coplus+V_k+%5Coplus+W&bg=ffffff&fg=333333&s=0&c=20201002)
![\tau = \chi_{\mathbf{R}[G]} - \chi_{\text{triv}} - \chi_i - \chi_j - \chi_k = 2\chi.](https://s0.wp.com/latex.php?latex=%5Ctau+%3D+%5Cchi_%7B%5Cmathbf%7BR%7D%5BG%5D%7D+-+%5Cchi_%7B%5Ctext%7Btriv%7D%7D+-+%5Cchi_i+-+%5Cchi_j+-+%5Cchi_k+%3D+2%5Cchi.&bg=ffffff&fg=333333&s=0&c=20201002)


so
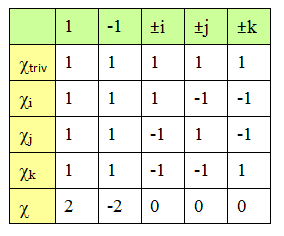
and so ρ(g) has eigenvalues ±√-1. From the character table, its trace is zero so the eigenvalues are +√-1 and -√-1.


![\mathbf{R}[G] \cong \mathbf{R} \times \mathbf{R} \times \mathbf{R} \times\mathbf{R} \times D](https://s0.wp.com/latex.php?latex=%5Cmathbf%7BR%7D%5BG%5D+%5Ccong+%5Cmathbf%7BR%7D+%5Ctimes+%5Cmathbf%7BR%7D+%5Ctimes+%5Cmathbf%7BR%7D+%5Ctimes%5Cmathbf%7BR%7D+%5Ctimes+D&bg=ffffff&fg=333333&s=0&c=20201002)


 taking
taking  is K-bilinear, so it induces a linear map
is K-bilinear, so it induces a linear map  taking
taking 

 It is given the structure of a K[G]-module as follows:
It is given the structure of a K[G]-module as follows:
 be the space of K-linear maps V → W. It is given the structure of a K[G]-module as follows:
be the space of K-linear maps V → W. It is given the structure of a K[G]-module as follows:
 when V and W are finite-dimensional. The LHS has a K[G]-module structure via (iv) while the RHS has a K[G]-module structure via (ii) and (iii). It is easy to check that they are consistent. ]
when V and W are finite-dimensional. The LHS has a K[G]-module structure via (iv) while the RHS has a K[G]-module structure via (ii) and (iii). It is easy to check that they are consistent. ]

 since
since  for any square matrices A and B with B invertible. Generally, a function χ : G → K is said to be a class function if
for any square matrices A and B with B invertible. Generally, a function χ : G → K is said to be a class function if  for any g, h in G. Thus characters are class functions.
for any g, h in G. Thus characters are class functions.

 be the space of G-invariant vectors. Then:
be the space of G-invariant vectors. Then:
 . We have:
. We have:
 which proves our lemma. ♦
which proves our lemma. ♦ The lemma says that the dimension of the space UG is:
The lemma says that the dimension of the space UG is:
 ; thus f is G-invariant if and only if
; thus f is G-invariant if and only if  for all g in G, v in V. In short, the space of G-invariant elements of U is precisely the space of intertwining operators V→W, or equivalently, K[G]-module homomorphisms V→W.
for all g in G, v in V. In short, the space of G-invariant elements of U is precisely the space of intertwining operators V→W, or equivalently, K[G]-module homomorphisms V→W.
 , where “g” here is an abstract symbol for each element g of G. Thus, K[G] has dimension |G| over K. Now K[G] has a ring structure obtained from group multiplication, where the algebra product σ⋅τ is precisely the group product, i.e. an element of G. For example, multiplication in Q[S3] gives
, where “g” here is an abstract symbol for each element g of G. Thus, K[G] has dimension |G| over K. Now K[G] has a ring structure obtained from group multiplication, where the algebra product σ⋅τ is precisely the group product, i.e. an element of G. For example, multiplication in Q[S3] gives , of G to the group of invertible K-linear maps M→M; such a ρ is called a representation of G over K. Indeed, if M is a K[G]-module, then considering how elements g ∈ K[G] acts on M (for g ∈ G), we obtain a homomorphism
, of G to the group of invertible K-linear maps M→M; such a ρ is called a representation of G over K. Indeed, if M is a K[G]-module, then considering how elements g ∈ K[G] acts on M (for g ∈ G), we obtain a homomorphism 
 , then this gives M the structure of a K[G]-module by letting
, then this gives M the structure of a K[G]-module by letting  (
( ) take m ∈ M to
) take m ∈ M to 

 is given by:
is given by:
 be the homomorphism taking
be the homomorphism taking  to the linear map
to the linear map
 for any
for any  Now M is a module over R[S3], where, e.g. a(1, 2) + b(1, 3, 2) takes the point (x, y, z) to (ay+by, ax+bz, az+bx) so its corresponding matrix is
Now M is a module over R[S3], where, e.g. a(1, 2) + b(1, 3, 2) takes the point (x, y, z) to (ay+by, ax+bz, az+bx) so its corresponding matrix is  assuming elements of M are written as column vectors.
assuming elements of M are written as column vectors.![q : K[G] \to K[G], \quad q(\alpha) := \frac 1 {|G|} \sum_{g\in G} g\cdot p(g^{-1} \alpha)](https://s0.wp.com/latex.php?latex=q+%3A+K%5BG%5D+%5Cto+K%5BG%5D%2C+%5Cquad+q%28%5Calpha%29+%3A%3D+%5Cfrac+1+%7B%7CG%7C%7D+%5Csum_%7Bg%5Cin+G%7D+g%5Ccdot+p%28g%5E%7B-1%7D+%5Calpha%29&bg=ffffff&fg=333333&s=0&c=20201002) for
for ![\alpha \in K[G].](https://s0.wp.com/latex.php?latex=%5Calpha+%5Cin+K%5BG%5D.&bg=ffffff&fg=333333&s=0&c=20201002)
 and since p(α) = α for all α in I, the result follows. Together with property 1, this means im(q) = I.
and since p(α) = α for all α in I, the result follows. Together with property 1, this means im(q) = I.
![K[G] \cong \prod_{i=1}^k M_{n_i}(D_i)](https://s0.wp.com/latex.php?latex=K%5BG%5D+%5Ccong+%5Cprod_%7Bi%3D1%7D%5Ek+M_%7Bn_i%7D%28D_i%29&bg=ffffff&fg=333333&s=0&c=20201002) and letting
and letting ![m_i = [D_i : K]](https://s0.wp.com/latex.php?latex=m_i+%3D+%5BD_i+%3A+K%5D&bg=ffffff&fg=333333&s=0&c=20201002) gives us
gives us![|G| = \dim_K K[G] = \sum_{i=1}^k n_i^2 m_i](https://s0.wp.com/latex.php?latex=%7CG%7C+%3D+%5Cdim_K+K%5BG%5D+%3D+%5Csum_%7Bi%3D1%7D%5Ek+n_i%5E2+m_i&bg=ffffff&fg=333333&s=0&c=20201002) ,
,
 is a division ring and
is a division ring and  is the ring of n × n matrices with entries in D. Furthermore, the list of
is the ring of n × n matrices with entries in D. Furthermore, the list of  is unique up to permutation, and isomorphism class of
is unique up to permutation, and isomorphism class of 

 are pairwise non-isomorphic.
are pairwise non-isomorphic.  is zero if M and M’ are not isomorphic, and is a division ring otherwise.
is zero if M and M’ are not isomorphic, and is a division ring otherwise.
 and
and  by the universal properties of direct sum and product. When we have finitely many terms, the direct sum is the direct product. ]
by the universal properties of direct sum and product. When we have finitely many terms, the direct sum is the direct product. ] , where
, where
 ]
]
 is either 0 (if i ≠ j) or isomorphic to
is either 0 (if i ≠ j) or isomorphic to  , where
, where  is a division ring. In conclusion:
is a division ring. In conclusion: for division rings
for division rings  corresponds to composition of endomorphisms
corresponds to composition of endomorphisms  . ]
. ] , for division ring D, has a unique simple module up to isomorphism, namely
, for division ring D, has a unique simple module up to isomorphism, namely  .
.
 , there are exactly k simple modules up to isomorphism, each simple module occurs
, there are exactly k simple modules up to isomorphism, each simple module occurs  . This shows that we can recover
. This shows that we can recover  is. Another of saying this is: R is “left semisimple” iff it is “right semisimple”.
is. Another of saying this is: R is “left semisimple” iff it is “right semisimple”. a submodule. Then we can find simple submodules
a submodule. Then we can find simple submodules  (indexed by
(indexed by  ) such that
) such that
 where
where  and only finitely many terms are non-zero.
and only finitely many terms are non-zero.
 ). [ For those who worry about set-theoretic validity, note that the collection of all such ∑ forms a bona fide set. ]
). [ For those who worry about set-theoretic validity, note that the collection of all such ∑ forms a bona fide set. ] is a chain: i.e. for any
is a chain: i.e. for any  either
either  or
or  Let
Let  let us show that
let us show that  is a direct sum.
is a direct sum. for some
for some  But this is a finite sum, so the equality already holds in some
But this is a finite sum, so the equality already holds in some  (since the
(since the  , pick
, pick  Since M is a sum of simple submodules, write
Since M is a sum of simple submodules, write , where each Mk is simple.
, where each Mk is simple. we have
we have  for some k. But this means
for some k. But this means  is a proper submodule of Mk, and must be zero (since Mk is simple). Hence
is a proper submodule of Mk, and must be zero (since Mk is simple). Hence  is a direct sum, so we could have added the simple module Mk to the collection ∑, contradicting its maximality. Thus,
is a direct sum, so we could have added the simple module Mk to the collection ∑, contradicting its maximality. Thus,  and we’re done. ♦
and we’re done. ♦ is a semisimple submodule of a module M, then so is
is a semisimple submodule of a module M, then so is 
 is a sum of simple modules; by definition so is N. ♦
is a sum of simple modules; by definition so is N. ♦ .
. . ♦
. ♦ is a direct sum of simple modules. ♦
is a direct sum of simple modules. ♦ as a direct sum of simple left ideals. Then any simple module M is isomorphic to some
as a direct sum of simple left ideals. Then any simple module M is isomorphic to some  for a single simple module N; this just means N is the only simple R-module up to isomorphism. ]
for a single simple module N; this just means N is the only simple R-module up to isomorphism. ]
 are both simple,
are both simple,  or an isomorphism. If all
or an isomorphism. If all  , then so is
, then so is  which is absurd. Hence some
which is absurd. Hence some  is an isomorphism, which proves the first statement.
is an isomorphism, which proves the first statement. only finitely many of the modules are non-zero.
only finitely many of the modules are non-zero.  where
where 
 gives:
gives:
 . ♦
. ♦ . Is this semisimple? [ Answer:
. Is this semisimple? [ Answer:  , we often cannot find a
, we often cannot find a  such that
such that  and N + P = M, which just means that every element of M is uniquely writable as x+y, with x in N and y in P). A good example is given by N = 2Z, M = Z; for any other submodule P of Z, we either get P=0 or a non-zero module which must necessarily intersect N.
and N + P = M, which just means that every element of M is uniquely writable as x+y, with x in N and y in P). A good example is given by N = 2Z, M = Z; for any other submodule P of Z, we either get P=0 or a non-zero module which must necessarily intersect N. and
and  we have the multiplication
we have the multiplication  . This ensures that multiplication-by-r followed by multiplication-by-s is simply multiplication-by-sr, since s(rm) = (sr)m. In the case of right modules, this would have been multiplication-by-rs. ]
. This ensures that multiplication-by-r followed by multiplication-by-s is simply multiplication-by-sr, since s(rm) = (sr)m. In the case of right modules, this would have been multiplication-by-rs. ] , we have
, we have  ]
] , we must have P = N or P = M. From the correspondence between (a) submodules of M/N and (b) submodules of M containing N, we conclude that N is maximal iff M/N is simple. ]
, we must have P = N or P = M. From the correspondence between (a) submodules of M/N and (b) submodules of M containing N, we conclude that N is maximal iff M/N is simple. ] Its image is a non-zero submodule of M so must be the whole of M. Thus f is surjective and
Its image is a non-zero submodule of M so must be the whole of M. Thus f is surjective and  ♦
♦ is a homomorphism of simple modules, then either f=0 or f is an isomorphism. In particular, the ring
is a homomorphism of simple modules, then either f=0 or f is an isomorphism. In particular, the ring  is a division ring for a simple module M.
is a division ring for a simple module M. and
and  ? [ Answer:
? [ Answer:  Let M be the space R2 and R acts on M via multiplying matrix with vector. Find a simple submodule of M. [ Answer:
Let M be the space R2 and R acts on M via multiplying matrix with vector. Find a simple submodule of M. [ Answer: 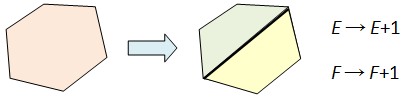

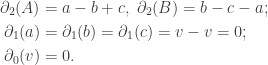
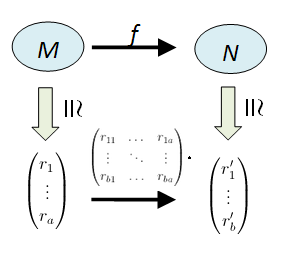
 , then the boundary map is additive:
, then the boundary map is additive:  as can be seen in the following diagram:
as can be seen in the following diagram: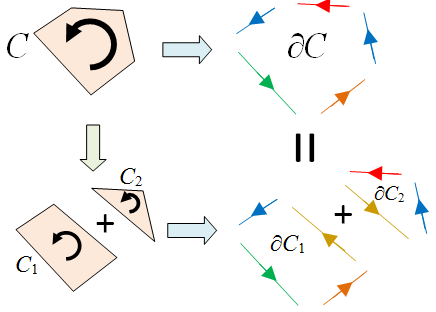
 where
where  are i-dimensional cells and
are i-dimensional cells and  These sums are formal in the sense that we merely treat them symbolically; the set of such sums forms a real vector space
These sums are formal in the sense that we merely treat them symbolically; the set of such sums forms a real vector space  via the following operations
via the following operations ;
; .
.
 is the zero map. It follows from basic linear algebra that we have
is the zero map. It follows from basic linear algebra that we have  as subspaces of
as subspaces of 
 .
.

 is isomorphic to
is isomorphic to  for j = i+1, i, i-1, i-2.
for j = i+1, i, i-1, i-2.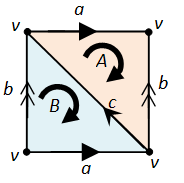
 is spanned by a single element
is spanned by a single element 
 is spanned by
is spanned by  is the full space spanned by {
is the full space spanned by {
 and
and  is spanned by
is spanned by 

 instead of vector spaces
instead of vector spaces  , where M is the underlying object and i=0, 1, 2, … .
, where M is the underlying object and i=0, 1, 2, … .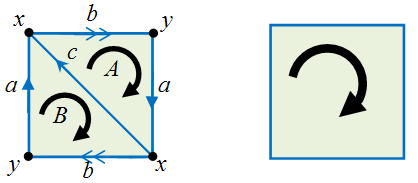


 so the second homology group is
so the second homology group is  Next,
Next,  has Z-basis a+b+c and a–c+b, or equivalently, a+b+c and 2c. On the other hand,
has Z-basis a+b+c and a–c+b, or equivalently, a+b+c and 2c. On the other hand,  has Z-basis a+b and c. Thus, the resulting group quotient is
has Z-basis a+b and c. Thus, the resulting group quotient is  Finally,
Finally,  has basis x–y while
has basis x–y while  has basis x, y, so the homology group is
has basis x, y, so the homology group is 
 and
and  Thus, the homology groups may differ even if the Betti numbers are the same, but computing the homology groups is a little harder than finding the Betti numbers. This form of homology is known as cellular homology.
Thus, the homology groups may differ even if the Betti numbers are the same, but computing the homology groups is a little harder than finding the Betti numbers. This form of homology is known as cellular homology.![\Delta = [ v_0, v_1, \ldots, v_m ]](https://s0.wp.com/latex.php?latex=%5CDelta+%3D+%5B+v_0%2C+v_1%2C+%5Cldots%2C+v_m+%5D&bg=ffffff&fg=333333&s=0&c=20201002) with its boundary given by:
with its boundary given by:![\partial_i([v_0, v_1, \ldots, v_m]) := \sum_{i=0}^m (-1)^i [v_0, \ldots, \hat{v_i}, \ldots, v_m],](https://s0.wp.com/latex.php?latex=%5Cpartial_i%28%5Bv_0%2C+v_1%2C+%5Cldots%2C+v_m%5D%29+%3A%3D+%5Csum_%7Bi%3D0%7D%5Em+%28-1%29%5Ei+%5Bv_0%2C+%5Cldots%2C+%5Chat%7Bv_i%7D%2C+%5Cldots%2C+v_m%5D%2C&bg=ffffff&fg=333333&s=0&c=20201002)
 . E.g.
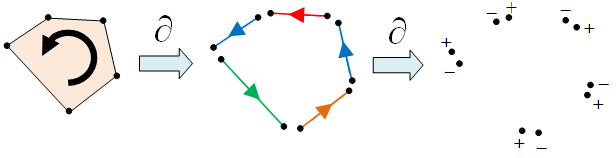
. E.g. ![\partial_2([a, b, c]) = [b,c] - [a,c] + [a,b].](https://s0.wp.com/latex.php?latex=%5Cpartial_2%28%5Ba%2C+b%2C+c%5D%29+%3D+%5Bb%2Cc%5D+-+%5Ba%2Cc%5D+%2B+%5Ba%2Cb%5D.&bg=ffffff&fg=333333&s=0&c=20201002) As an exercise, check that under this definition, we have
As an exercise, check that under this definition, we have 
![\partial_2([a, c, d]) = [c,d] - [a,d] + [a,c],](https://s0.wp.com/latex.php?latex=%5Cpartial_2%28%5Ba%2C+c%2C+d%5D%29+%3D+%5Bc%2Cd%5D+-+%5Ba%2Cd%5D+%2B+%5Ba%2Cc%5D%2C&bg=ffffff&fg=333333&s=0&c=20201002)
![\partial_1([a,e]) = [e] - [a]](https://s0.wp.com/latex.php?latex=%5Cpartial_1%28%5Ba%2Ce%5D%29+%3D+%5Be%5D+-+%5Ba%5D&bg=ffffff&fg=333333&s=0&c=20201002) and
and ![\partial_0([d]) = 0.](https://s0.wp.com/latex.php?latex=%5Cpartial_0%28%5Bd%5D%29+%3D+0.&bg=ffffff&fg=333333&s=0&c=20201002) Now it suffices to obtain the homology groups from the sequence
Now it suffices to obtain the homology groups from the sequence  which is left as an exercise for the reader.
which is left as an exercise for the reader.


 , we get
, we get![\begin{aligned}\sum_i (-1)^i b_i(M) &= \sum_i (-1)^i\dim(\text{ker}(\partial_i)) - (-1)^i\sum_i\dim(\text{im}(\partial_{i+1}))\\ &=\sum_i (-1)^i \dim(\text{ker} (\partial_i)) + \sum_i (-1)^{i+1}\dim( \text{im}(\partial_{i+1})) \\ &=\sum_i (-1)^i [\dim(\text{ker} (\partial_i)) + \dim(\text{im}(\partial_i))] \\ &= \sum_i (-1)^i |S_i| =\chi(M)\end{aligned}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Baligned%7D%5Csum_i+%28-1%29%5Ei+b_i%28M%29+%26%3D+%5Csum_i+%28-1%29%5Ei%5Cdim%28%5Ctext%7Bker%7D%28%5Cpartial_i%29%29+-+%28-1%29%5Ei%5Csum_i%5Cdim%28%5Ctext%7Bim%7D%28%5Cpartial_%7Bi%2B1%7D%29%29%5C%5C+%26%3D%5Csum_i+%28-1%29%5Ei+%5Cdim%28%5Ctext%7Bker%7D+%28%5Cpartial_i%29%29+%2B+%5Csum_i+%28-1%29%5E%7Bi%2B1%7D%5Cdim%28+%5Ctext%7Bim%7D%28%5Cpartial_%7Bi%2B1%7D%29%29+%5C%5C+%26%3D%5Csum_i+%28-1%29%5Ei+%5B%5Cdim%28%5Ctext%7Bker%7D+%28%5Cpartial_i%29%29+%2B+%5Cdim%28%5Ctext%7Bim%7D%28%5Cpartial_i%29%29%5D+%5C%5C+%26%3D+%5Csum_i+%28-1%29%5Ei+%7CS_i%7C+%3D%5Cchi%28M%29%5Cend%7Baligned%7D&bg=ffffff&fg=333333&s=0&c=20201002)
 . Recall that the principle of inclusion and exclusion allows us to compute the Euler characteristics of X from those of M, N and M ∩ N. The question is: what about Betti numbers and homology groups? We would very much like to say
. Recall that the principle of inclusion and exclusion allows us to compute the Euler characteristics of X from those of M, N and M ∩ N. The question is: what about Betti numbers and homology groups? We would very much like to say  but we would be lying if we did. Instead, we have the extended exact sequence:
but we would be lying if we did. Instead, we have the extended exact sequence:
 we have
we have  Also, the direct sum
Also, the direct sum  of two groups is simply their product. ]
of two groups is simply their product. ] then maps chains of M to those of
then maps chains of M to those of  Clearly, if an m-chain D of M satisfies ∂D = 0, so does its image in
Clearly, if an m-chain D of M satisfies ∂D = 0, so does its image in  is of the form ∂E’, where E’ is the image of E in
is of the form ∂E’, where E’ is the image of E in  induces a map of homology groups:
induces a map of homology groups: and similarly
and similarly 
 and
and  are injective, in general
are injective, in general  and
and  are not. ] Likewise, the inclusions
are not. ] Likewise, the inclusions  and
and  induce
induce  and
and  Now we define:
Now we define: as the map
as the map ![[D] \mapsto ({j_M}_*([D]), -{j_N}_*([D]))](https://s0.wp.com/latex.php?latex=%5BD%5D+%5Cmapsto+%28%7Bj_M%7D_%2A%28%5BD%5D%29%2C+-%7Bj_N%7D_%2A%28%5BD%5D%29%29&bg=ffffff&fg=333333&s=0&c=20201002) ,
, as the map
as the map ![[D] \mapsto {i_M}_*([D]) + {i_N}_*([D]).](https://s0.wp.com/latex.php?latex=%5BD%5D+%5Cmapsto+%7Bi_M%7D_%2A%28%5BD%5D%29+%2B+%7Bi_N%7D_%2A%28%5BD%5D%29.&bg=ffffff&fg=333333&s=0&c=20201002)

 This is the union of
This is the union of and
and 
 The long exact sequence above thus gives (together with
The long exact sequence above thus gives (together with  since we’re dealing with two or three-dimensional objects here):
since we’re dealing with two or three-dimensional objects here):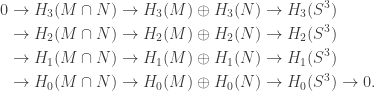
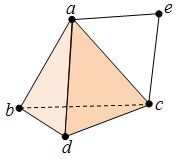
 and hence the full 3-simplex on [0, 1, 2, 3], it is easy to check that they have trivial homology in dimensions ≥ 1. On the other hand, M ∩ N is homeomorphic to the surface of a cube so we get:
and hence the full 3-simplex on [0, 1, 2, 3], it is easy to check that they have trivial homology in dimensions ≥ 1. On the other hand, M ∩ N is homeomorphic to the surface of a cube so we get:
 since it’s easy to check that
since it’s easy to check that  is injective.
is injective.







 is a basis of the quotient space V/W, then the vi‘s, together with a basis
is a basis of the quotient space V/W, then the vi‘s, together with a basis  of W, form a basis of V:
of W, form a basis of V: for some
for some  , its image in V/W gives
, its image in V/W gives  and thus each
and thus each  is zero. This gives
is zero. This gives  ; since
; since  This proves that
This proves that  is linearly independent.
is linearly independent. . Its image v+W in V/W can be written as a linear combination
. Its image v+W in V/W can be written as a linear combination  for some
for some  Hence
Hence  and can be written as a linear combination of
and can be written as a linear combination of  So v can be written as a linear combination of
So v can be written as a linear combination of 
 and let f : V → W take the tuple
and let f : V → W take the tuple  Then f is injective but not surjective.
Then f is injective but not surjective. , in which case we can identify
, in which case we can identify  via
via  Let’s restrict ourselves to the case of finite free modules, i.e. modules with finite bases. If
Let’s restrict ourselves to the case of finite free modules, i.e. modules with finite bases. If  and
and  the group of homomorphisms is identified with
the group of homomorphisms is identified with  in terms of b × a matrices in R.
in terms of b × a matrices in R. of M and
of M and  of N. We have:
of N. We have: and
and 
 and
and  where x is an indeterminate here. The map f : M → N given by f(p(x)) = dp/dx is easily checked to be R-linear.
where x is an indeterminate here. The map f : M → N given by f(p(x)) = dp/dx is easily checked to be R-linear. Hence, the matrix corresponding to these bases is
Hence, the matrix corresponding to these bases is 
 ;
; ;
;

 ;
;
 Replacing the basis by {-1, 1+√2} would give us:
Replacing the basis by {-1, 1+√2} would give us: 
 as an R-module isomorphism. What about Hom(M, R) then?
as an R-module isomorphism. What about Hom(M, R) then? This is a
This is a  , then the resulting
, then the resulting  takes
takes  .
.
 takes m to
takes m to  which is the image of
which is the image of  acting on m.
acting on m. is called the dual because it’s a right module instead of a left one. Note that if N were a right-module, the resulting space Hom(N, R) of all right-module homomorphisms would give us a left module
is called the dual because it’s a right module instead of a left one. Note that if N were a right-module, the resulting space Hom(N, R) of all right-module homomorphisms would give us a left module  It’s not true in general that
It’s not true in general that  but it holds for finite-dimensional vector spaces over a division ring.
but it holds for finite-dimensional vector spaces over a division ring.
 which takes (f, v) to f(v). Fixing f, we get a map
which takes (f, v) to f(v). Fixing f, we get a map  which is a left-module homomorphism. Fixing v, we get a right-module homomorphism
which is a left-module homomorphism. Fixing v, we get a right-module homomorphism  since (f·r) corresponds to the map
since (f·r) corresponds to the map  by definition. This gives a left-module homomorphism
by definition. This gives a left-module homomorphism 
 . But if
. But if  , we can extend {v} to a basis of V. Define a linear map f : V → D which takes v to 1 and all other basis elements to 0. Then
, we can extend {v} to a basis of V. Define a linear map f : V → D which takes v to 1 and all other basis elements to 0. Then  so
so  This shows that
This shows that  is injective and thus an isomorphism. ♦
is injective and thus an isomorphism. ♦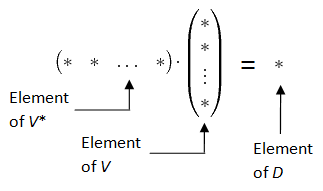
 What’s wrong with this definition? [ Answer:
What’s wrong with this definition? [ Answer:  is a basis of V. Let
is a basis of V. Let  (i = 1, …, n) be linear maps defined as follows:
(i = 1, …, n) be linear maps defined as follows:
 This is called the dual basis for
This is called the dual basis for 
 is linearly independent. For that, we write
is linearly independent. For that, we write  for some
for some  (recall that V* is a
(recall that V* is a 
 and
and  we can write
we can write  and
and  for some
for some  Then
Then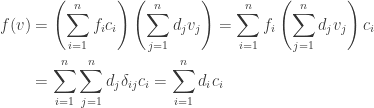
 , there’s a natural inner product given by the usual dot product which is inherent in the geometry of the space. However, for generic vector spaces, it’s hard to find a natural inner product. E.g. what would one be for the space of all polynomials of degree at most 2? Thus, the dual space provides a “cheap” and natural way to get an inner product.
, there’s a natural inner product given by the usual dot product which is inherent in the geometry of the space. However, for generic vector spaces, it’s hard to find a natural inner product. E.g. what would one be for the space of all polynomials of degree at most 2? Thus, the dual space provides a “cheap” and natural way to get an inner product. over the reals R=R. Examples of elements of V* are:
over the reals R=R. Examples of elements of V* are: which takes
which takes  ;
; which takes
which takes  ;
; which takes
which takes  .
. be a basis of V and
be a basis of V and  be its dual basis for V*. Denote the dual basis of
be its dual basis for V*. Denote the dual basis of  in V**. Prove that under the isomorphism
in V**. Prove that under the isomorphism  , we have
, we have 
 be a basis of V and
be a basis of V and  is denoted M.
is denoted M. be the dual basis of
be the dual basis of  be the dual basis of
be the dual basis of  is the transpose of M.
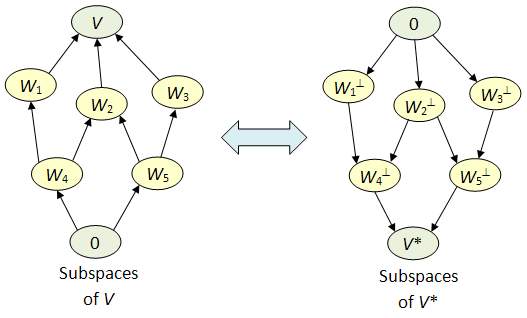
is the transpose of M. is a subspace, define
is a subspace, define 
 is a subspace, define
is a subspace, define 
 is a subspace of V*;
is a subspace of V*; is a subspace of V;
is a subspace of V; , then
, then  ;
; , then
, then  ;
; and
and  .
. is the subspace of V generated by W.
is the subspace of V generated by W. . Likewise if
. Likewise if 
 of W and extend it to a basis
of W and extend it to a basis  be the dual basis.
be the dual basis. write
write  where each
where each  Since v is outside W,
Since v is outside W,  for some j>k. This gives
for some j>k. This gives  and
and  since j>k. Hence
since j>k. Hence  and we have
and we have 
 . ♦
. ♦
 ;
; naturally.
naturally. This proves our claim. ♦
This proves our claim. ♦
{kind=link}