Determinant Modules
We will describe another construction for the Schur module.
Introduce variables  for
for  . For each sequence
. For each sequence  we define the following polynomials in :
we define the following polynomials in :
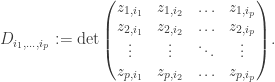
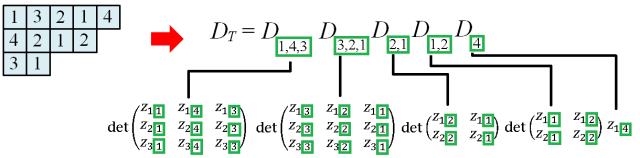
Now given a filling T of shape λ, we define:

where  is the sequence of entries from the i-th column of T. E.g.
is the sequence of entries from the i-th column of T. E.g.
Let ![\mathbb{C}[z_{i,j}]](https://s0.wp.com/latex.php?latex=%5Cmathbb%7BC%7D%5Bz_%7Bi%2Cj%7D%5D&bg=ffffff&fg=333333&s=0&c=20201002) be the ring of polynomials in
be the ring of polynomials in  with complex coefficients. Since we usually take entries of T from [n], we only need to consider the subring
with complex coefficients. Since we usually take entries of T from [n], we only need to consider the subring ![\mathbb{C}[z_{i,1}, \ldots, z_{i,n}]](https://s0.wp.com/latex.php?latex=%5Cmathbb%7BC%7D%5Bz_%7Bi%2C1%7D%2C+%5Cldots%2C+z_%7Bi%2Cn%7D%5D&bg=ffffff&fg=333333&s=0&c=20201002) .
.

Let  Recall from earlier that any non-zero
Recall from earlier that any non-zero  -equivariant map
-equivariant map

must induce an isomorphism between the unique copies of  in the source and target spaces. Given any filling T of shape
in the source and target spaces. Given any filling T of shape  , we let
, we let  be the element of
be the element of  obtained by replacing each entry k in T by
obtained by replacing each entry k in T by  , then taking the wedge of elements in each column, followed by the tensor product across columns:
, then taking the wedge of elements in each column, followed by the tensor product across columns:

Note that the image of in  is precisely
is precisely  as defined in the last article.
as defined in the last article.
Definition. We take the map

where belongs to component 
E.g. in our example above,  is homogeneous in
is homogeneous in  of degree 5,
of degree 5,  of degree 4 and
of degree 4 and  of degree 3. We let
of degree 3. We let  act on via:
act on via:

Thus if we fix i and consider the variables  as a row vector, then
as a row vector, then  . From another point of view, if we take
. From another point of view, if we take  as a basis, then the action is represented by matrix g since it takes the standard basis to the column vectors of g.
as a basis, then the action is represented by matrix g since it takes the standard basis to the column vectors of g.
Proposition. The map is -equivariant.
Proof
The element  takes
takes  by taking the column vectors of g; so
by taking the column vectors of g; so

where T’ is the filling obtained from T by replacing its entries  with
with  correspondingly.
correspondingly.
On the other hand, the determinant  gets mapped to:
gets mapped to:

which is  . ♦
. ♦
Since contains exactly one copy of , it has a unique -submodule Q such that the quotient is isomorphic to  The resulting quotient is thus identical to the Schur module F(V), and the above map factors through
The resulting quotient is thus identical to the Schur module F(V), and the above map factors through

Now we can apply results from the last article:
Corollary 1. The polynomials satisfy the following:
 if T has two identical entries in the same column.
if T has two identical entries in the same column. if T’ is obtained from T by swapping two entries in the same column.
if T’ is obtained from T by swapping two entries in the same column. , where S takes the set of all fillings obtained from T by swapping a fixed set of k entries in column j’ with arbitrary sets of k entries in column j (for fixed j < j’) while preserving the order.
, where S takes the set of all fillings obtained from T by swapping a fixed set of k entries in column j’ with arbitrary sets of k entries in column j (for fixed j < j’) while preserving the order.
Proof
Indeed, the above hold when we replace by  Now apply the above linear map. ♦
Now apply the above linear map. ♦
Corollary 2. The set of , for all SSYT  with shape λ and entries in [n], is linearly independent over
with shape λ and entries in [n], is linearly independent over 
Proof
Indeed, the set of these is linearly independent over  and the above map is injective. ♦
and the above map is injective. ♦
Example 1.
Consider any bijective filling T for  . Writing out the third relation in corollary 1 gives:
. Writing out the third relation in corollary 1 gives:
![\left[\det\begin{pmatrix} a & c \\ b & d\end{pmatrix}\right] x = \left[\det\begin{pmatrix} x & c \\ y & d\end{pmatrix}\right] a + \left[ \det\begin{pmatrix} a & x \\ b & y\end{pmatrix}\right] c.](https://s0.wp.com/latex.php?latex=%5Cleft%5B%5Cdet%5Cbegin%7Bpmatrix%7D+a+%26+c+%5C%5C+b+%26+d%5Cend%7Bpmatrix%7D%5Cright%5D+x+%3D+%5Cleft%5B%5Cdet%5Cbegin%7Bpmatrix%7D+x+%26+c+%5C%5C+y+%26+d%5Cend%7Bpmatrix%7D%5Cright%5D+a+%2B+%5Cleft%5B+%5Cdet%5Cbegin%7Bpmatrix%7D+a+%26+x+%5C%5C+b+%26+y%5Cend%7Bpmatrix%7D%5Cright%5D+c.&bg=ffffff&fg=333333&s=0&c=20201002)
More generally, if satisfies  and
and  , the corresponding third relation is obtained by multiplying the above by a polynomial on both sides.
, the corresponding third relation is obtained by multiplying the above by a polynomial on both sides.
Example 2: Sylvester’s Identity
Take the  SYT by writing
SYT by writing  in the left column and
in the left column and  in the right. Now
in the right. Now  is the product:
is the product:

In the sum , each summand is of the form  , where matrices M’, N’ are obtained from M, N respectively by swapping a fixed set of k columns in N with arbitrary sets of k columns in M while preserving the column order. E.g. for n=3 and k=2, picking the first two columns of N gives:
, where matrices M’, N’ are obtained from M, N respectively by swapping a fixed set of k columns in N with arbitrary sets of k columns in M while preserving the column order. E.g. for n=3 and k=2, picking the first two columns of N gives:


